纺织学报 ›› 2024, Vol. 45 ›› Issue (01): 203-210.doi: 10.13475/j.fzxb.20221202301
夏风林( ), 张航, 张琦, 郑宝平
), 张航, 张琦, 郑宝平
XIA Fenglin(), ZHANG Hang, ZHANG Qi, ZHENG Baoping
摘要:
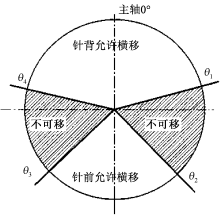
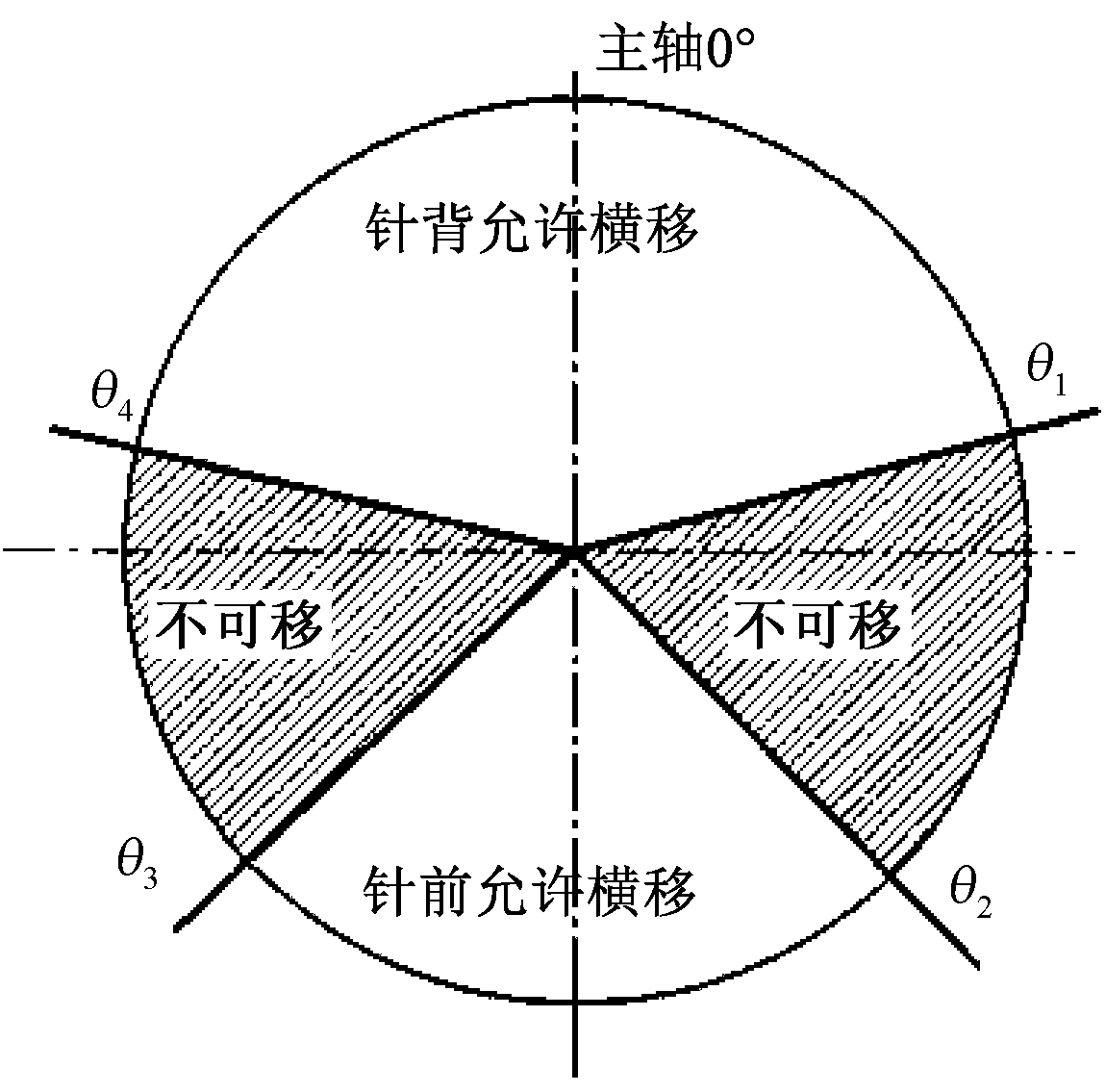
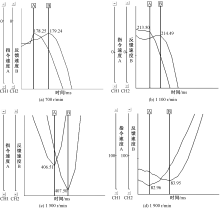
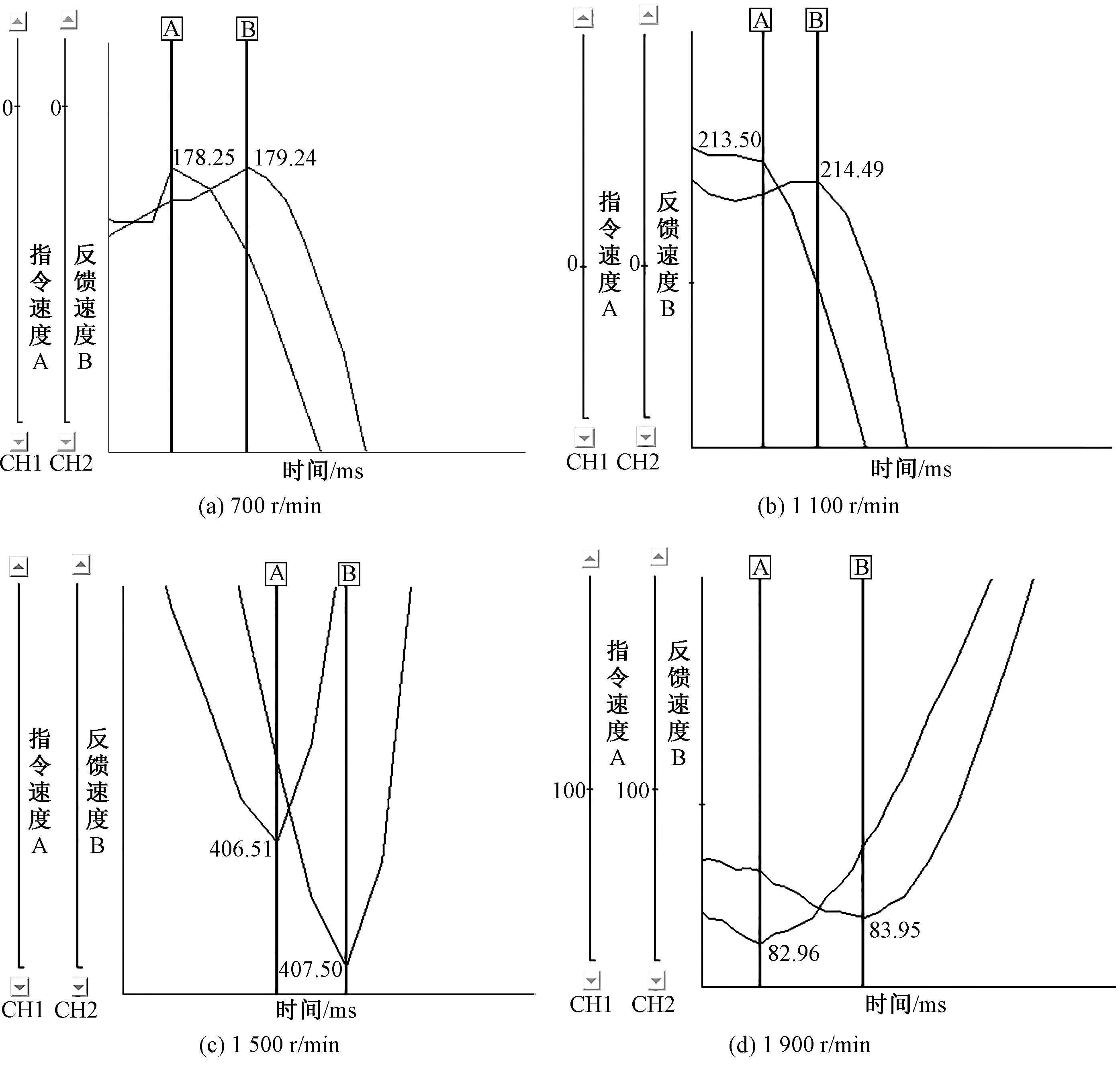
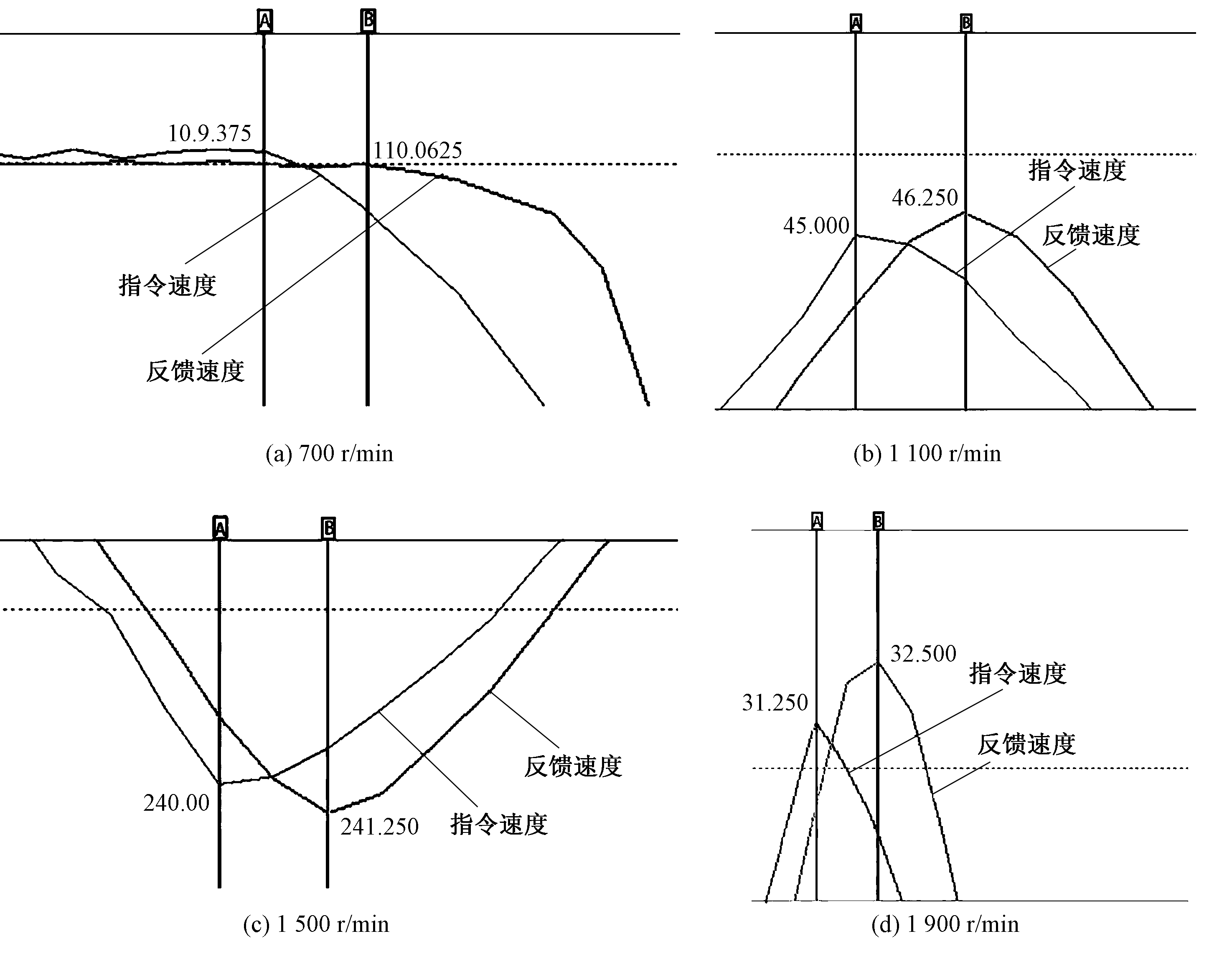
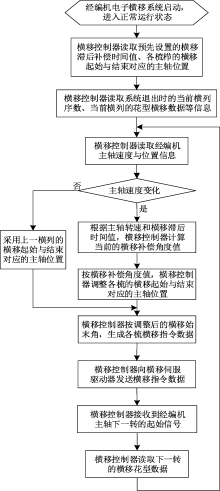
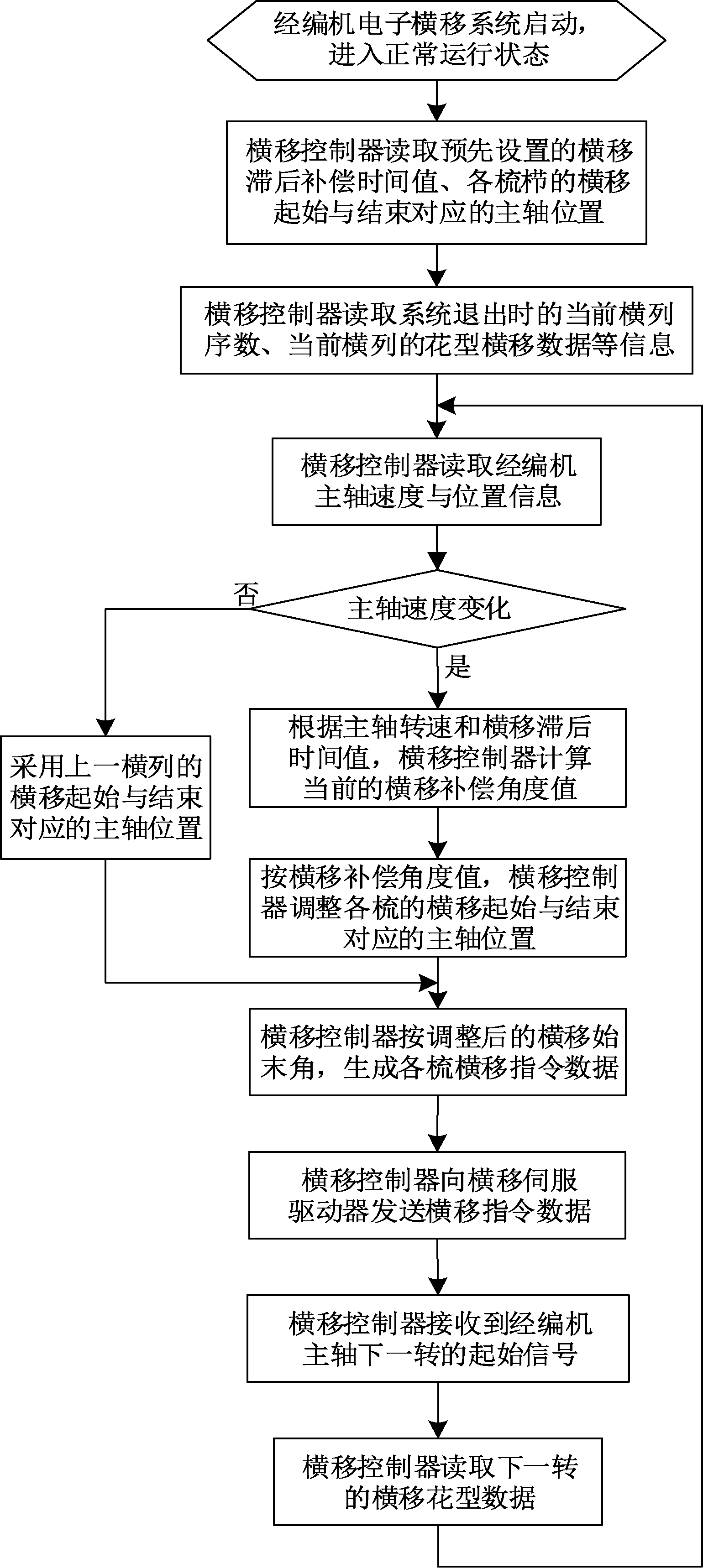
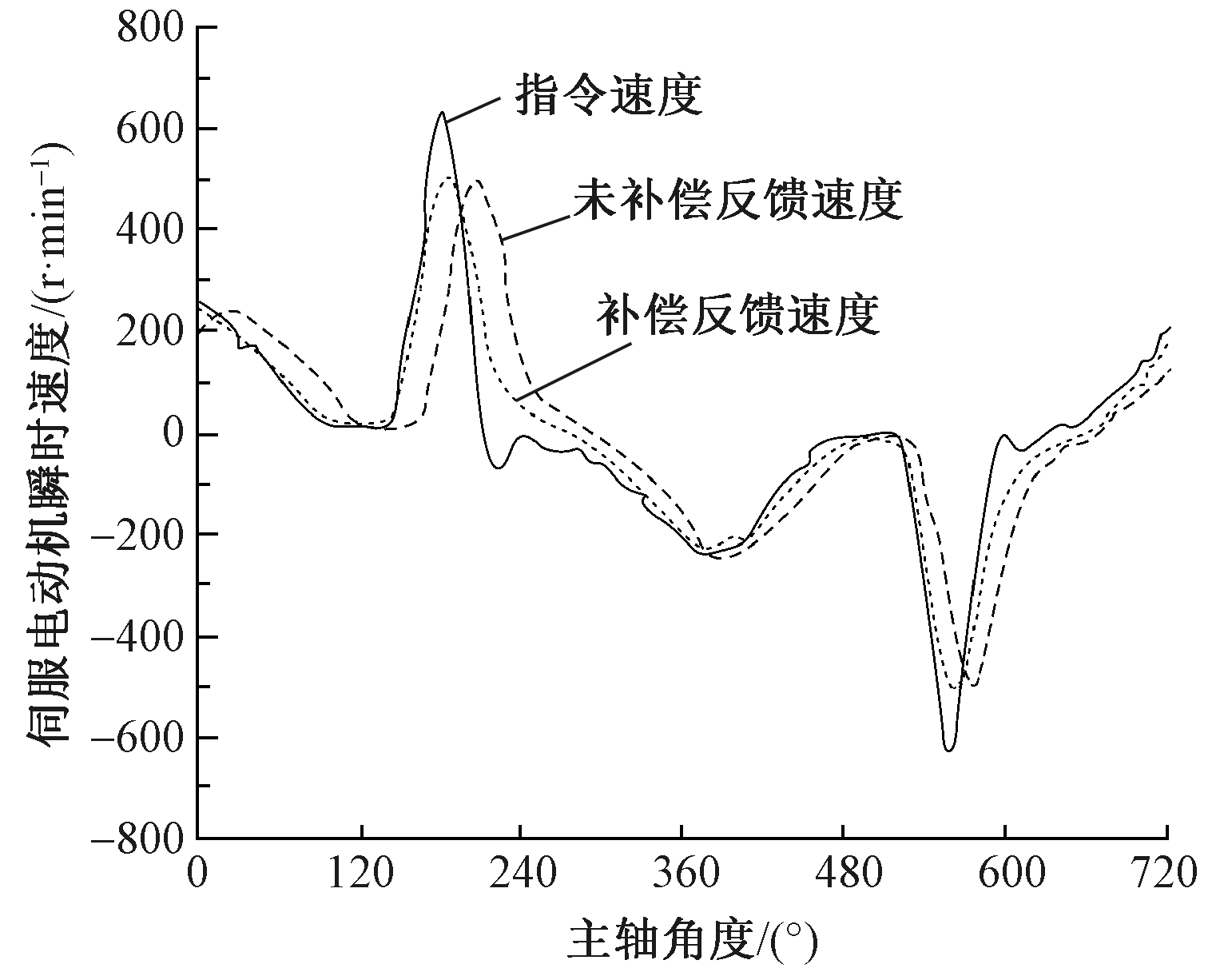
为解决经编机电子横移系统中横移动作滞后、不能满足经编机高速运转需要的问题,通过实验测试了经编机电子横移系统中常用的3种交流伺服系统的伺服驱动器接收的指令信号曲线和伺服电动机实际运动曲线,确定了各伺服系统的运动响应的滞后时间,并针对性地设计了一种与主轴运转实时同步的横移指令信号以弥补横移滞后的补偿方案,即根据经编机实时转速来动态预置横移指令信号的提前量,以弥补电子横移系统的滞后时间。结果表明:在相同系统配置条件下,电子横移系统通过设置合适的指令信号提前时间量作为补偿值,即根据经编机主轴的当前运转速度,采用提前发出横移指令信号的方法可有效补偿横移伺服的滞后响应特性,保证了梳栉横移与摆动动作的同步性,电子横移经编机的运转速度可提高约18%,从而显著提升电子横移经编机的生产效率。
中图分类号:
| [1] | 沈瑞超, 郗欣甫, 蔡飞飞, 等. 基于模糊电子凸轮曲线控制的经编机电子横移控制系统[J]. 东华大学学报(自然科学版), 2020, 46(5):779-786. |
| SHEN Ruichao, CHI Xinfu, CAI Feifei, et al. Electronic shogging control system of warp knitting machine based on fuzzy electronic cam curve control[J]. Journal of Donghua University(Natural Science), 2020, 46(5):779-786. | |
| [2] | KARL Mayer. Tricot machine KS4 EL-EBC with electronic pattern drive[J]. Kettenwirk Praxis, 1990(2):8-9. |
| [3] | WEBER M, ZOU Qian. ITMA 2015: Development trend and innovation of warp knitting[J]. Melliand China, 2016, 44(6): 32-38. |
| [4] | JAMS M B. ITMA 2019: Teeming with innovation & positive sentiments[J]. Textile World, 2019, 169(4):4. |
| [5] | 周博. 经编机电子横移系统建模与控制方法研究[D]. 泉州: 华侨大学, 2014:1-48. |
| ZHOU Bo. Study on the model and control strategy of warp knitting machine[D]. Quanzhou: Huaqiao University, 2014:1-48. | |
| [6] | 张琳芳, 黄智坤. 基于PLC与人机界面的经编机电子横移控制系统研究[J]. 广东石油化工学院学报, 2016, 26(6):52-56. |
| ZHANG Linfang, HUANG Zhikun. Research and application of electronic Shogging system on warp knitting machine through PLC and man-machine interface[J]. Journal of Guangdong University of Petrochemical Technology, 2016, 26(6):52-56. | |
| [7] | 张琦, 蒋高明, 夏风林, 等. 动态变结构控制策略在经编机高速电子横移中的应用[J]. 纺织学报, 2013, 34(3):121-126. |
| ZHANG Qi, JIANG Gaoming, XIA Fenglin, et al. Research on dynamic variable structure control strategy for high-speed electronic shogging motion on warp knitting machine[J]. Journal of Textile Research, 2013, 34(3): 121-126. | |
| [8] | 郑宝平, 蒋高明, 夏风林, 等. 双PID控制的经编机电子横移系统设计[J]. 纺织学报, 2012, 33(5):135-139. |
| ZHENG Baoping, JIANG Gaoming, XIA Fenglin, et al. Design of electronic shogging system based on double PID control on warp knitting machine[J]. Journal of Textile Research, 2012, 33(5):135-139. | |
| [9] | 郑静, 夏风林. 基于PID参数的经编机电子横移系统优化[J]. 上海纺织科技, 2018, 46(5):52-55. |
| ZHENG Jing, XIA Fenglin. Optimization of electronic traverse system of warp knitting machine based on PID parameters[J]. Shanghai Textile Science & Technology, 2018, 46(5):52-55. | |
| [10] | 付睿云, 孟婥, 卜剑秋, 等. 经编机电子横移系统伺服刚度的提高[J]. 东华大学学报(自然科学版), 2019, 45(2): 270-274. |
| FU Ruiyun, MENG Zhuo, BU Jianqiu, et al. Improvement of servo stiffness of electronic shogging system on warp knitting machine[J]. Journal of Donghua University (Natural Science), 2019, 45( 2) :270-274. | |
| [11] | 苏柳元, 孟婥, 张玉井, 等. 经编机梳栉横移系统误差建模与仿真[J]. 纺织学报, 2018, 39(8):130-137. |
| SU Liuyuan, MENG Zhuo, ZHANG Yujing, et al. Modeling and simulation of transverse motion error of guide bar shogging system of warp knitting machine[J]. Journal of Textile Research, 2018, 39(8): 130-137. | |
| [12] | 王博浩, 郗欣甫, 孙以泽. 基于时域法的经编机电子横移系统动态性能[J]. 东华大学学报(自然科学版), 2021, 47(6):58-65. |
| WANG Bohao, CHI Xinfu, SUN Yize. Dynamic performance of electronic shogging system of warp knitting machine based on time domain method[J]. Journal of Donghua University(Natural Science), 2021, 47(6):58-65. | |
| [13] | 郭威东, 夏风林, 张琦, 等. 经编机电子横移系统高速响应性的影响因素[J]. 纺织学报, 2021, 42(1):162-166. |
| GUO Weidong, XIA Fenglin, ZHANG Qi, et al. Influence factors of high speed response of electronic traverse system of warp knitting machine[J]. Journal of Textile Research, 2021, 42(1):162-166. | |
| [14] | 郑宝平, 蒋高明, 夏风林, 等. 基于模型预测的经编送经动态张力补偿控制系统[J]. 纺织学报, 2021, 42(9),163-169. |
| ZHENG Baoping, JIANG Gaoming, XIA Fenglin, et al. Dynamic tension compensation control system of warp knitting let-off based on model prediction[J]. Journal of Textile Research, 2021, 42(9),163-169. | |
| [15] | 鲁斌. 自给能中子探测器多模式信号延迟补偿算法研究[D]. 兰州: 兰州大学, 2022:1-41. |
| LU Bin. Research on multi-mode signal delay compensation algorithm for self-powered neutron detector[D]. Lanzhou: Lanzhou University, 2022:1-41. | |
| [16] | 姜福喜. 基于扰动估计与动态补偿的伺服系统鲁棒跟踪控制设计[D]. 湘潭: 湖南科技大学, 2021:5-49. |
| JIANG Fuxi. Robust tracking control design of servo system based on disturbance estimation and dynamic compensation[D]. Xiangtan: Hunan University of Science and Technology, 2021:5-49. | |
| [17] | 朱文斌. 机器人力控磨削系统的标定与动态补偿技术研究[D]. 太原: 中北大学, 2021:6-39. |
| ZHU Wenbin. Research on calibration and dynamic compensation technology of robotic force-controlled grinding system[D]. Taiyuan: North University of China, 2021:6-39. | |
| [18] | 蒋高明. 针织学[M]. 中国纺织出版社, 2015:178-185. |
| JIANG Gaoming. Knitting technology[M]. China Textile & Apparel Press, 2015:178-185. |
| [1] | 戴宁, 梁汇江, 胡旭东, 陆哲昊, 徐开心, 袁嫣红, 屠佳佳, 曾志发. 纬编针织机编织过程中三角振动响应特性[J]. 纺织学报, 2023, 44(10): 181-187. |
| [2] | 孙园园, 张琦, 张燕婷, 左露娇, 丁宁宇. 三维通孔结构三色三贾卡提花间隔鞋材的研发[J]. 纺织学报, 2023, 44(07): 110-115. |
| [3] | 杨宏脉, 张效栋, 闫宁, 朱琳琳, 李娜娜. 一种高鲁棒性经编机上断纱在线检测算法[J]. 纺织学报, 2023, 44(05): 139-146. |
| [4] | 陈志昊, 包文杰, 李富才, 静波, 黄朝林, 孙建文. 基于快速自适应经验模态分解的高速经编机振动分析[J]. 纺织学报, 2023, 44(04): 204-211. |
| [5] | 万爱兰, 沈新燕, 王晓晓, 赵树强. 聚多巴胺修饰还原氧化石墨烯/聚吡咯导电织物的制备及其传感响应特性[J]. 纺织学报, 2023, 44(01): 156-163. |
| [6] | 郑宝平, 蒋高明. 基于云服务器的经编机数据管理系统设计[J]. 纺织学报, 2022, 43(07): 186-192. |
| [7] | 牟浩蕾, 解江, 裴惠, 冯振宇, 耿宏章. 芳纶织物及其包容环的弹道冲击与数值模拟[J]. 纺织学报, 2021, 42(11): 56-63. |
| [8] | 郑宝平, 蒋高明, 夏风林, 张爱军. 基于模型预测的经编送经动态张力补偿系统设计[J]. 纺织学报, 2021, 42(09): 163-169. |
| [9] | 郭威东, 夏风林, 张琦. 经编机电子横移系统高速响应性的影响因素[J]. 纺织学报, 2021, 42(01): 162-166. |
| [10] | 孙帅, 缪旭红, 张琦, 王瑾. 高速经编机上纱线张力的波动规律[J]. 纺织学报, 2020, 41(03): 51-55. |
| [11] | 汪健东, 夏风林, 李亚林, 赵钰宁. 经编机梳栉电子横移伺服的最优滑模控制[J]. 纺织学报, 2020, 41(02): 143-148. |
| [12] | 徐云龙, 夏风林. 双针床经编机间隔距离对纱线需求量的影响分析[J]. 纺织学报, 2019, 40(08): 151-156. |
| [13] | 张琦, 魏莉, 罗成, 夏风林, 蒋高明. 基于双总线架构的经编机双贾卡提花控制系统[J]. 纺织学报, 2019, 40(07): 145-150. |
| [14] | 徐云龙, 夏风林. 双针床经编机梳栉摆动对瞬时需纱量和纱线张力的影响[J]. 纺织学报, 2019, 40(06): 106-110. |
| [15] | 苏柳元 孟婥 张玉井 赵义满. 经编机梳栉横移系统误差建模与仿真[J]. 纺织学报, 2018, 39(08): 130-137. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号