纺织学报 ›› 2025, Vol. 46 ›› Issue (04): 215-225.doi: 10.13475/j.fzxb.20240801601
李顺1,2, 贾彦军1,2( ), 李新荣1,2, 冯文倩1,2, 文嘉琪1,2
), 李新荣1,2, 冯文倩1,2, 文嘉琪1,2
LI Shun1,2, JIA Yanjun1,2(), LI Xinrong1,2, FENG Wenqian1,2, WEN Jiaqi1,2
摘要:
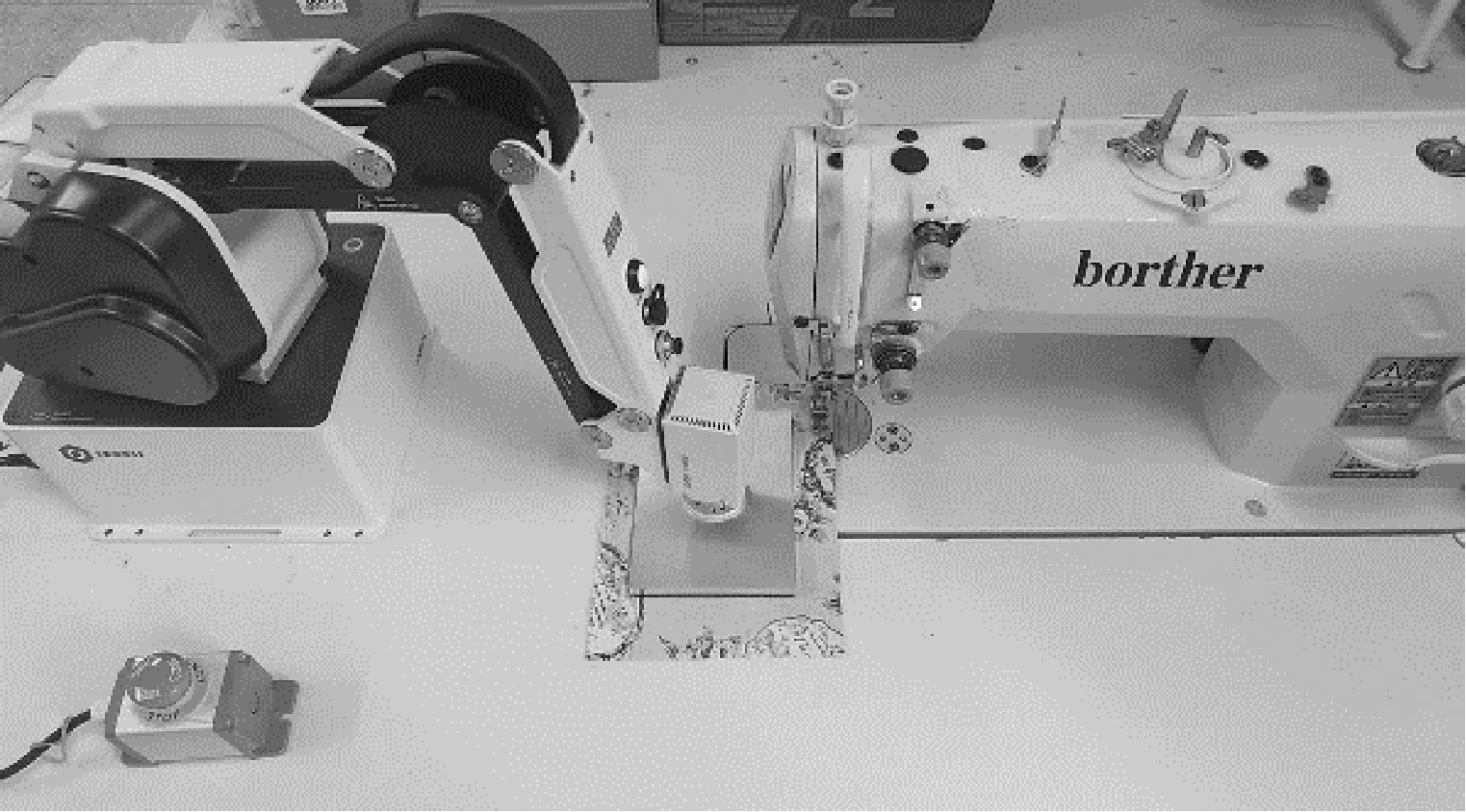
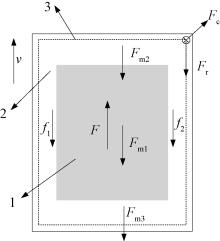
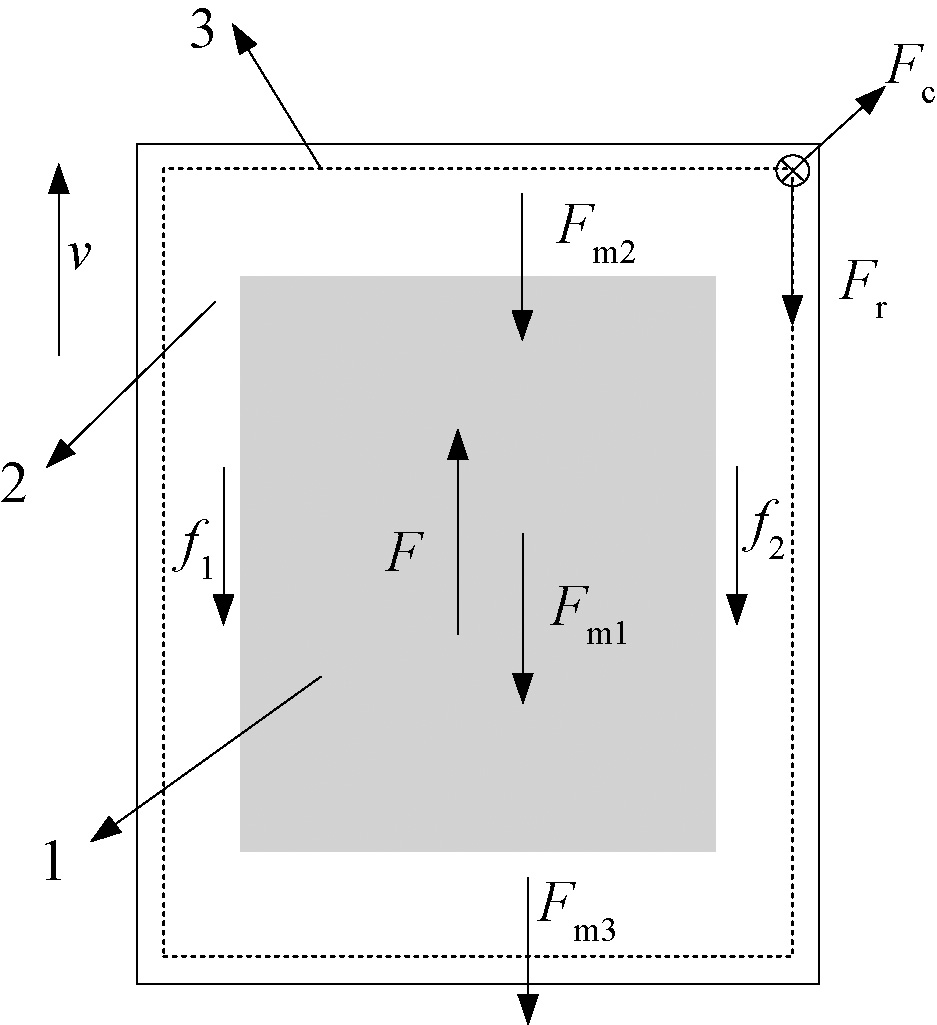
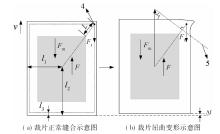
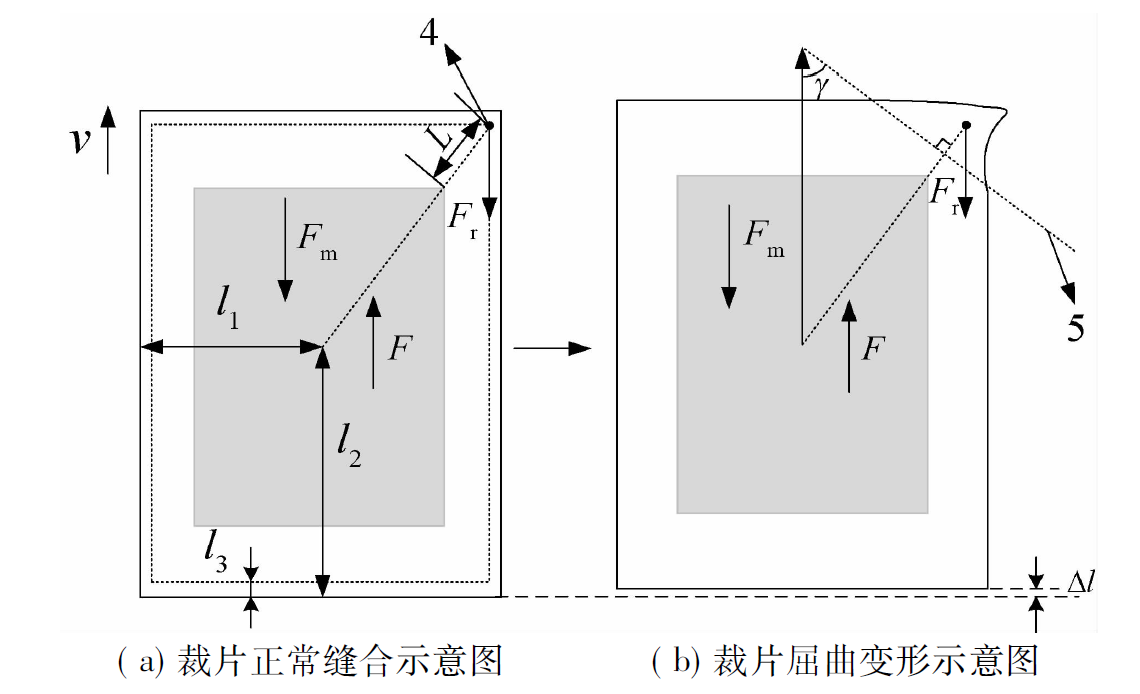
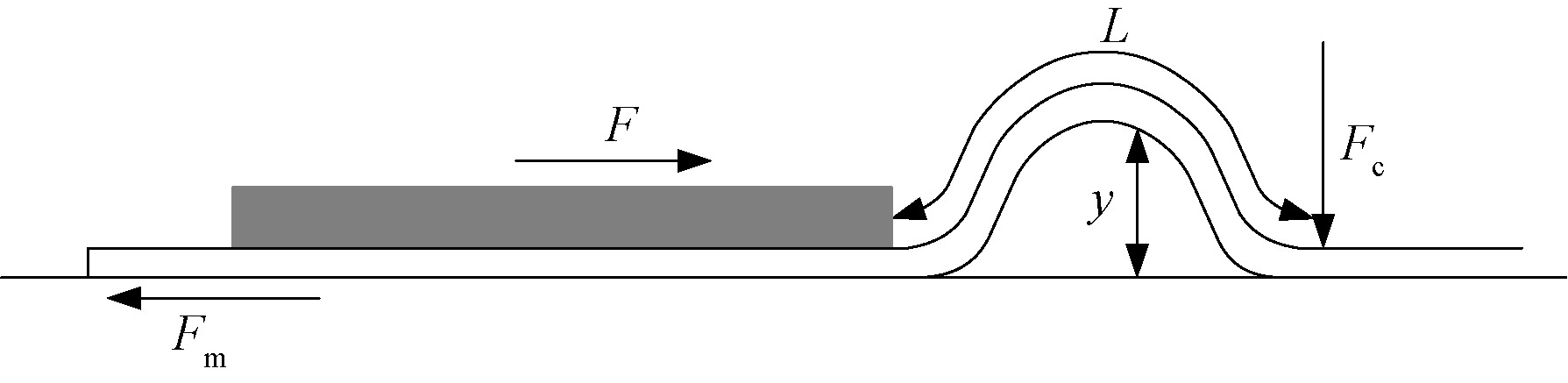
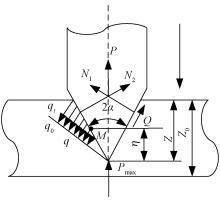
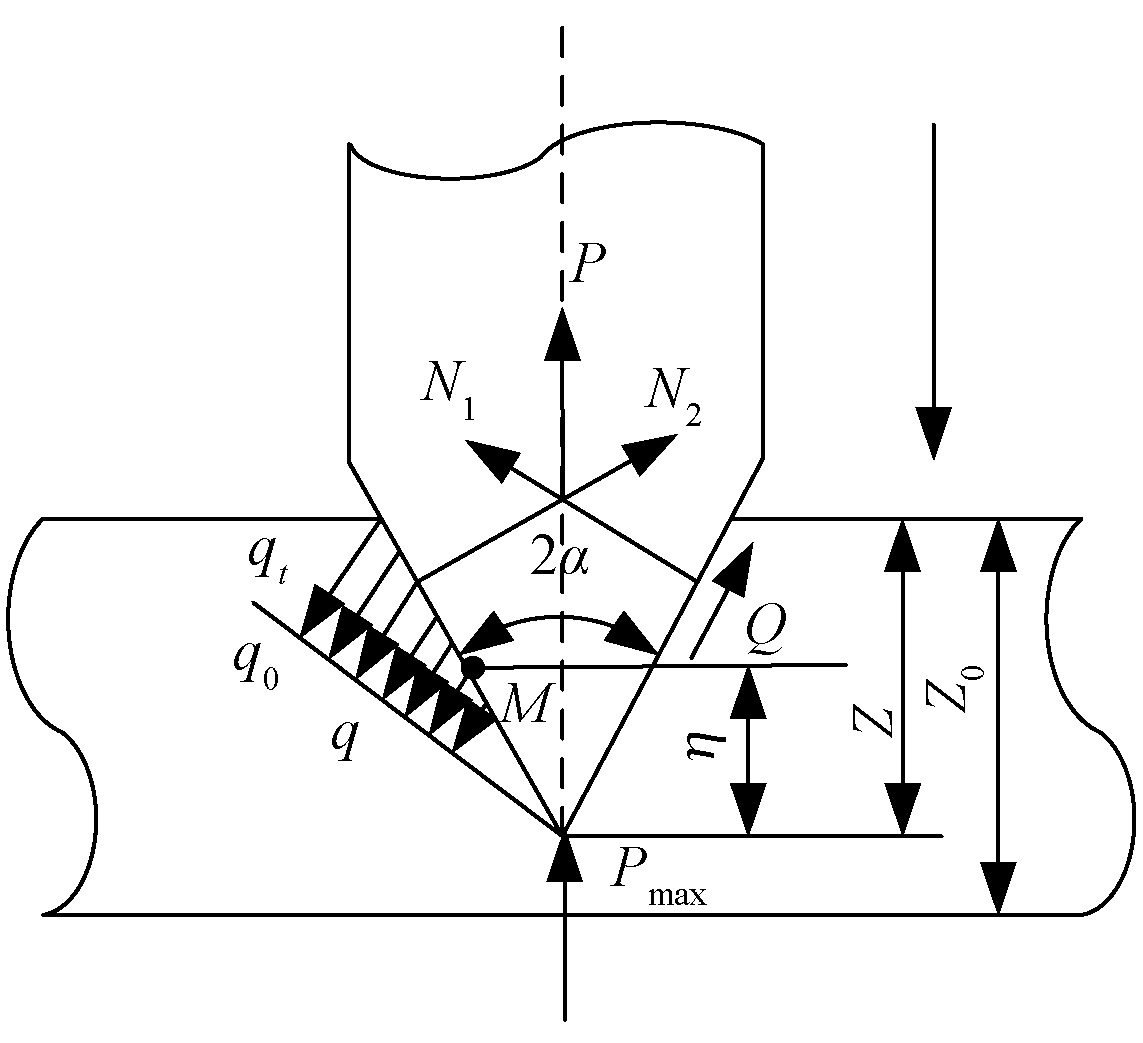
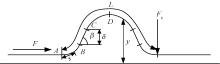
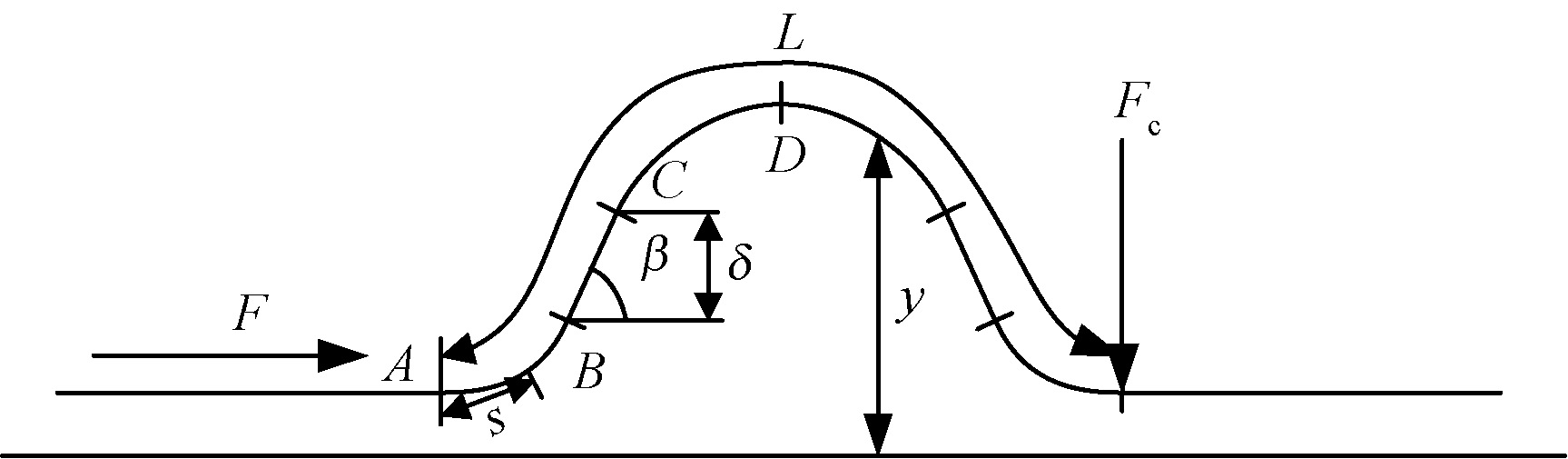
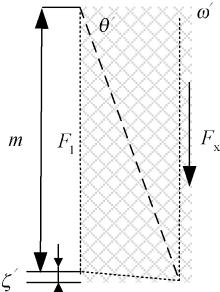
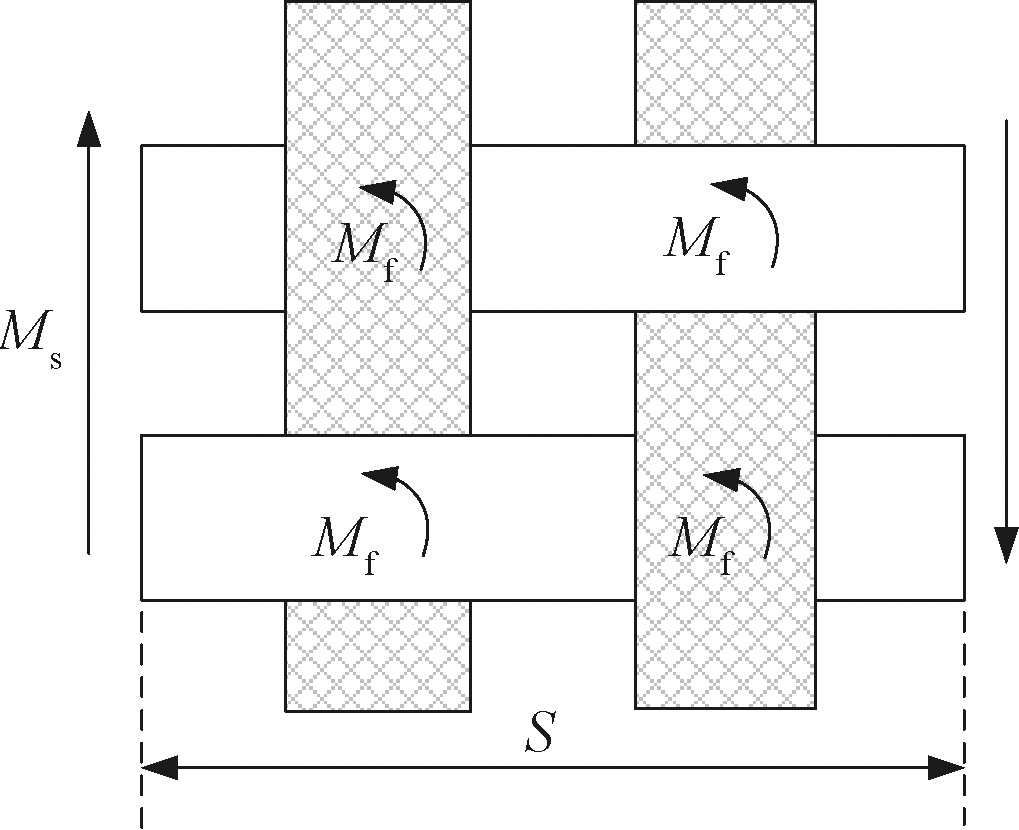
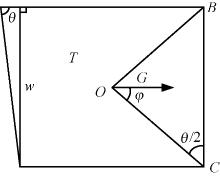
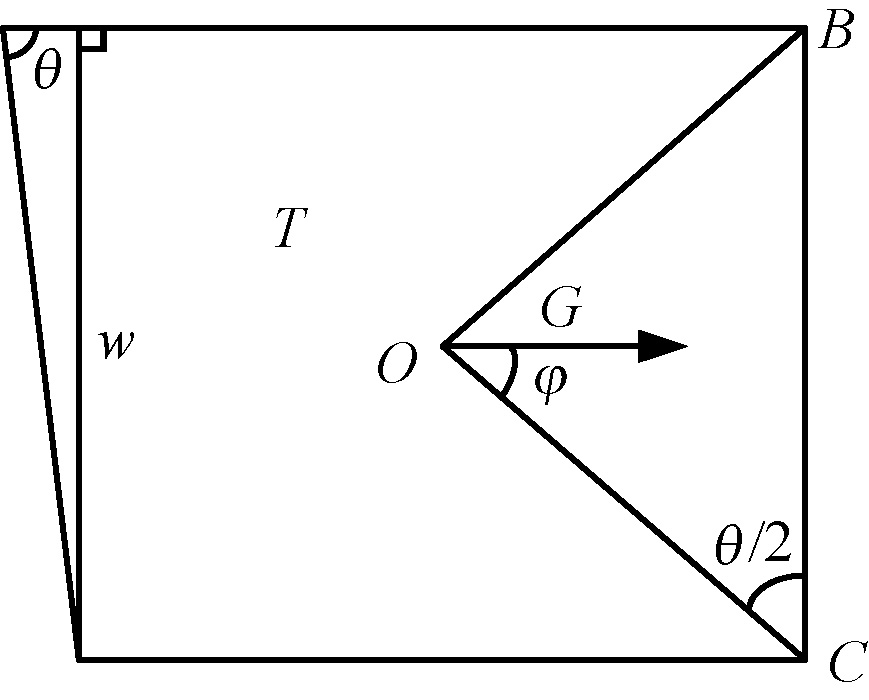
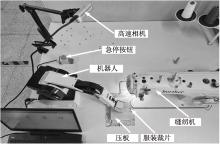
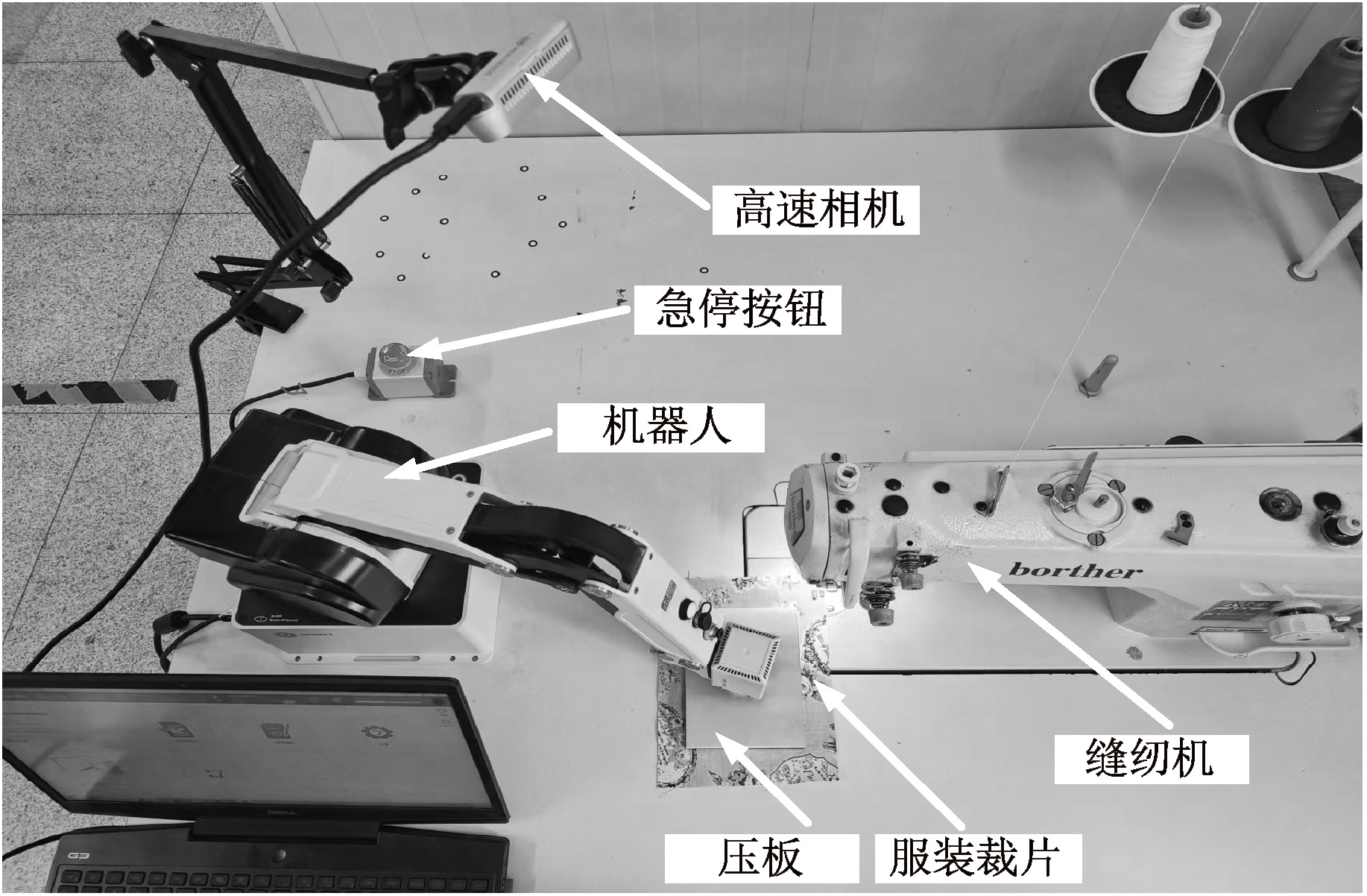
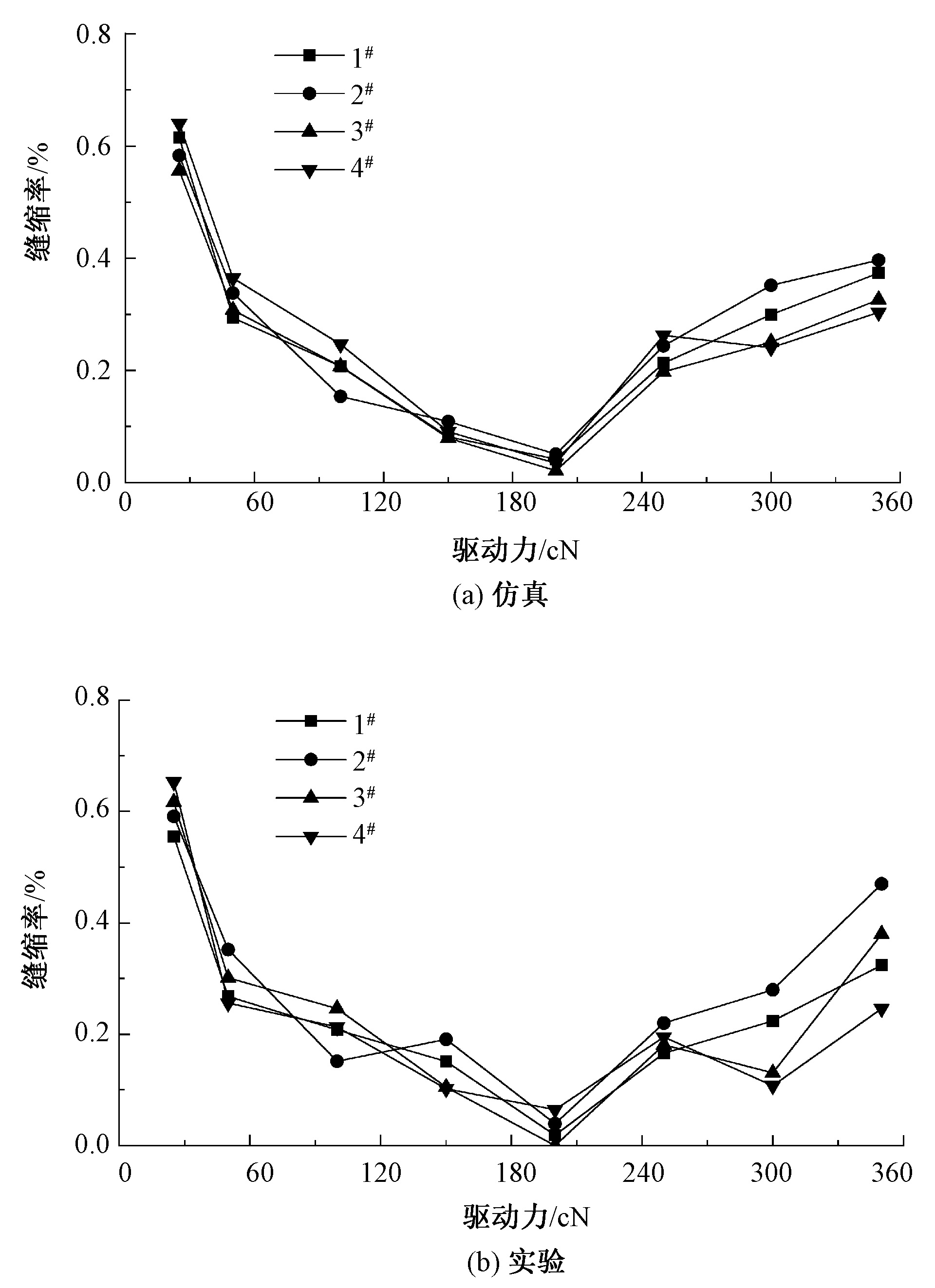
压板式协同缝合机器人是未来服装生产的主要设备,施加在压板上的驱动力、压板尺寸的不合适将导致裁片屈曲变形、起皱,直接影响缝合质量。针对压板按压裁片直线移动缝合过程中裁片出现的受力变形与压板尺寸难匹配问题,首先采用能量守恒法对裁片受压板与缝纫针共同作用时的屈曲变形过程进行研究,依据裁片屈曲时的非线性弯曲特性建立最小驱动力模型与裁片临界屈曲尺寸模型;其次根据剪力平衡条件与相框剪切实验对压板两侧裁片的剪切变形情况进行分析,建立两侧裁片挤压变形阶段临界状态下的最大驱动力模型;最后通过有限元仿真分析和搭建缝合机、压板协同缝合实验平台对所建模型进行验证,证明了驱动力模型与临界屈曲尺寸模型的正确性。结果表明,该驱动力模型为裁片直线移动缝合应施加的外力范围提供凭证,临界屈曲尺寸模型为实际生产压板尺寸的选择提供理论支撑,最终为保证缝合质量、效率和压板尺寸的选择提供依据。
中图分类号:
| [1] | 吴柳波, 李新荣, 杜金丽. 基于轮廓提取的缝合机器人运动轨迹规划研究进展[J]. 纺织学报, 2021, 42(4): 191-200. |
| WU Liubo, LI Xinrong, DU Jinli. Research progress of motion trajectory planning of sewing robot based on contour extraction[J]. Journal of Textile Research, 2021, 42(4): 191-200. | |
| [2] | PHAN P T, HOANG T T, THAI M T, et al. Twisting and braiding fluid-driven soft artificial muscle fibers for robotic applications[J]. Soft Robotics, 2022, 9(4): 820-836. |
| [3] | LI J, ZHOU C, LONG J, et al. Computational design of shape-changing robotic mannequin based on 3D human models[J]. Textile Research Journal, 2021, 91(9/10): 1065-1082. |
| [4] | HOU Y C, SAHARI K S M, HOW D N T. A review on modeling of flexible deformable object for dexterous robotic manipulation[J]. International Journal of Advanced Robotic Systems, 2019, 16(3): 18-26. |
| [5] |
El Messiry M, EL-TARFAWY S. Mechanical properties and buckling analysis of woven fabric[J]. Textile Research Journal, 2019, 89(14): 2900-2918.
doi: 10.1177/0040517518803777 |
| [6] | MOUSAZADEGAN F, LATIFI M. Investigating the relation of fabric's buckling behaviour and tension seam pucker formation[J]. The Journal of The Textile Institute, 2019, 110(4): 562-574. |
| [7] | WANG Y, ZHANG W, REN H, et al. An analytical model for the tension-shear coupling of woven fabrics with different weave patterns under large shear deformation[J]. Applied Sciences, 2020, 10(4): 1551-1566. |
| [8] | AHMAD B, FANG X. Modeling shear behavior of woven fabric thermoplastic composites for crash simulations[J]. Applied Composite Materials, 2020, 27(6): 739-765. |
| [9] |
王晓华, 王育合, 张蕾, 等. 缝纫机器人对织物张力与位置的模糊阻抗控制J]. 纺织学报, 2021, 42(11): 173-178.
doi: 10.13475/j.fzxb.20200605706 |
|
WANG Xiaohua, WANG Yuhe, ZHANG Lei, et al. Force and position fuzzy impedance control of a sewing robot[J]. Journal of Textile Research, 2021, 42 (11): 173-178.
doi: 10.13475/j.fzxb.20200605706 |
|
| [10] | PENG L, LI Y, ZHENG Q, et al. Measurement of axial motion yarn tension based on transverse vibration frequency[J]. Textile Research Journal, 2023, 93(5/6): 1019-1029. |
| [11] |
付天宇, 李凤鸣, 崔涛, 等. 基于视觉/力觉的机器人协同缝制系统[J]. 机器人, 2022, 44(3): 352-360.
doi: 10.13973/j.cnki.robot.210414 |
|
FU Tianyu, LI Fengming, CUI Tao, et al. A robotic collaborative sewing system based on visual and force perception[J]. Robot, 2022, 44 (3): 352-360.
doi: 10.13973/j.cnki.robot.210414 |
|
| [12] | 文嘉琪, 李新荣, 李兴兴, 等. 面向服装面料自动缝合的缝纫工艺参数建模[J]. 纺织学报, 2023, 44(3): 158-167. |
| WEN Jiaqi, LI Xinrong, LI Xingxing, et al. Parametrical modeling of sewing process for automatic stitching of garment fabrics[J]. Journal of Textile Research, 2023, 44(3): 158-167. | |
| [13] | SUN Y, TIAN Y, ZHENG D, et al. Theoretical modeling and characterization of bending properties of fabrics with friction and extensibility effect[J]. The Journal of the Textile Institute, 2022, 113(5): 748-760. |
| [14] | LIMENEH D Y, AYELE M, TESFAYE T, et al. Effect of weave structure on comfort property of fabric[J]. Journal of Natural Fibers, 2022, 19(11): 4148-4155. |
| [15] | BAI R, MA Y, LEI Z, et al. Shear deformation and energy absorption analysis of flexible fabric in yarn pullout test[J]. Composites Part A(Applied Science and Manufacturing), 2020. DOI: 10.1016/j.compositesa.2019.105678. |
| [16] | CHEN H, LI S, WANG J, et al. A focused review on the thermo-stamping process and simulation progresses of continuous fibre reinforced thermoplastic com-posites[J]. Composites Part B(Engineering), 2020. DOI: 10.1016/j.compositesb.2021.109196. |
| [17] | 侯耀晟树, 郭纬愉, 杜永龙, 等. 平纹SiC纤维织物剪切性能[J]. 硅酸盐通报, 2023, 42 (3): 1063-1073. |
| HOU Yaoshengshu, GUO Weiyu, DU Yonglong, et al. Shear properties of plain weave sic fiber fabrics[J]. Bulletin of the Chinese Ceramic Society, 2023, 42 (3): 1063-1073. | |
| [18] | CUBRIC I S, SKENDERI Z, HAVENITH G. Impact of raw material, yarn and fabric parameters, and finishing on water vapor resistance[J]. Textile Research Journal, 2013, 83(12): 1215-1228. |
| [1] | 黄小源, 王青云, 侯珏, 杨阳, 刘正. 基于技能熟练度的服装流水线仿真优化及其应用[J]. 纺织学报, 2025, 46(01): 169-178. |
| [2] | 王建萍, 朱妍西, 沈津竹, 张帆, 姚晓凤, 于卓灵. 软体机器人在服装领域的应用进展[J]. 纺织学报, 2024, 45(05): 239-247. |
| [3] | 马梓鸿, 陈慧敏, 丁孟孟, 岳晓丽. 面料堆垛非接触式分层吸附工艺模型与系统构建[J]. 纺织学报, 2024, 45(05): 209-217. |
| [4] | 鞠宇, 王朝晖, 李博一, 叶勤文. 基于机器学习的服装生产线员工效率预测[J]. 纺织学报, 2024, 45(05): 183-192. |
| [5] | 郑路, 颜伟雄, 胡觉亮, 韩曙光. 基于模块化的服装混合流水线平衡优化[J]. 纺织学报, 2022, 43(04): 140-146. |
| [6] | 黄珍珍, 莫碧贤, 温李红. 基于遗传算法及仿真技术的服装生产流水线平衡[J]. 纺织学报, 2020, 41(07): 154-159. |
| [7] | 闫亦农 刘立枝 雒彬钰 崔慧荣. 基于粒子群算法的服装生产流水线编制[J]. 纺织学报, 2018, 39(10): 120-124. |
| [8] | 胡少营 张龙琳 张文斌. 采用熟练率的服装流水线节拍设计模型[J]. 纺织学报, 2015, 36(05): 133-138. |
| [9] | 朱秀丽;杭小刚;吴春胜. 服装生产台产量的学习曲线及应用[J]. 纺织学报, 2007, 28(7): 125-128. |
| [10] | 李敏;石旭光. 基于时间竞争的服装生产工艺与组织方式[J]. 纺织学报, 2007, 28(6): 123-127. |
| [11] | 李国富;叶飞帆;徐雪鸿. 服装企业集群敏捷客户化制造研究[J]. 纺织学报, 2006, 27(6): 116-120. |
| [12] | 李克兢;崔世忠. 模块化服装快速生产设计系统的开发[J]. 纺织学报, 2006, 27(1): 50-53. |
| [13] | 李重;胡觉亮;吴庆标. 服装生产流水线的计算机仿真[J]. 纺织学报, 2005, 26(4): 118-120. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号