纺织学报 ›› 2022, Vol. 43 ›› Issue (07): 178-185.doi: 10.13475/j.fzxb.20201205708
屠佳佳1,2, 孙磊1, 毛慧敏1, 戴宁1, 朱婉珍1, 史伟民1( )
)
TU Jiajia1,2, SUN Lei1, MAO Huimin1, DAI Ning1, ZHU Wanzhen1, SHI Weimin1()
摘要:
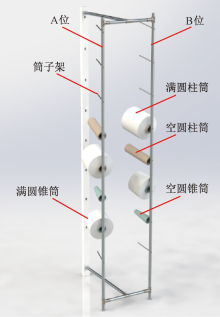
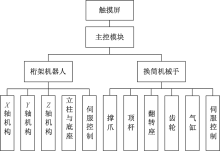
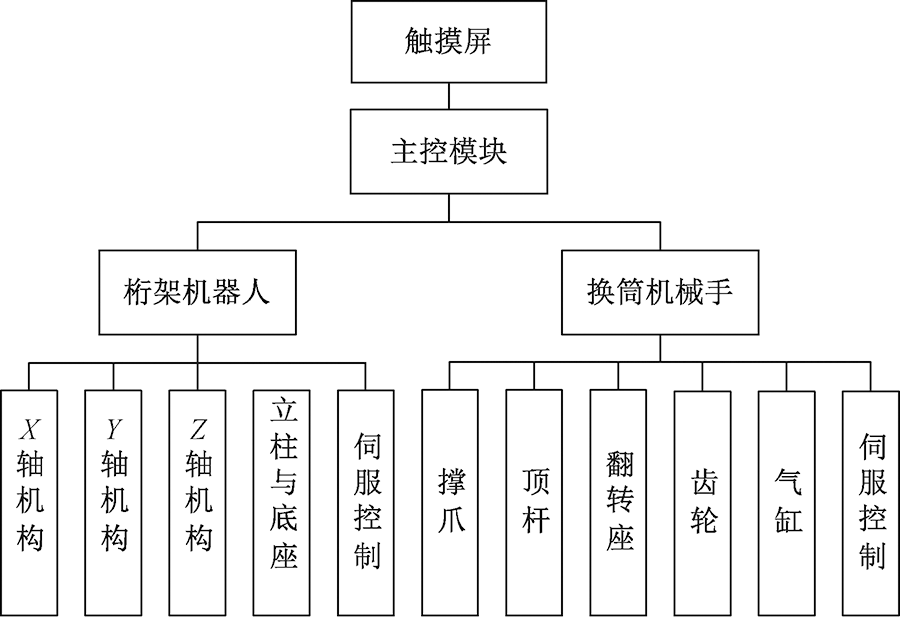
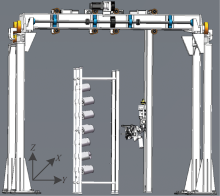
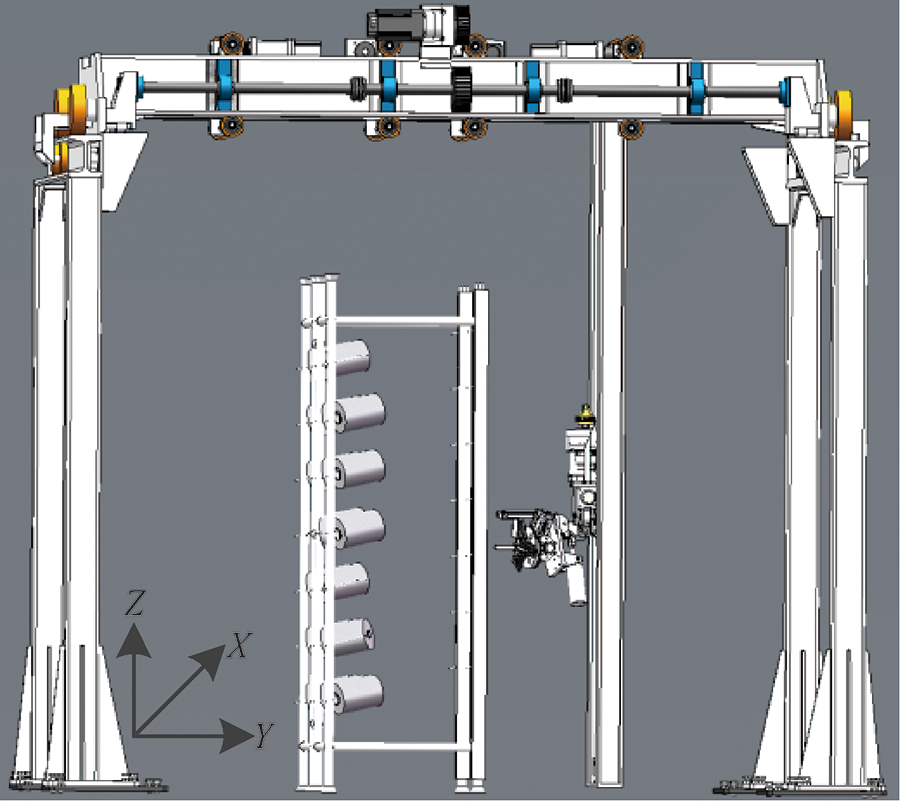
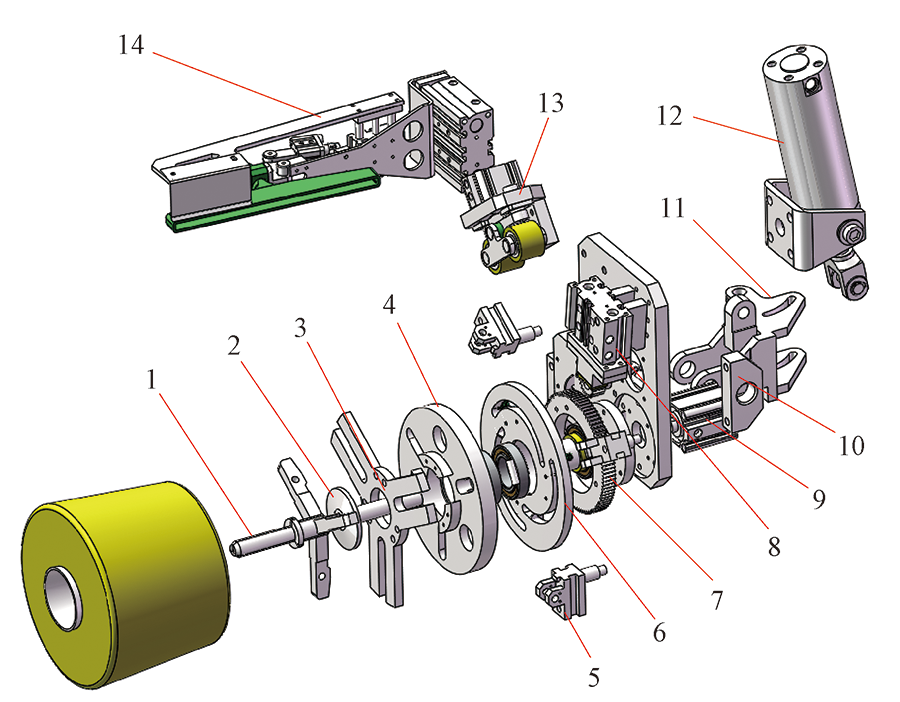
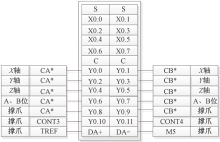
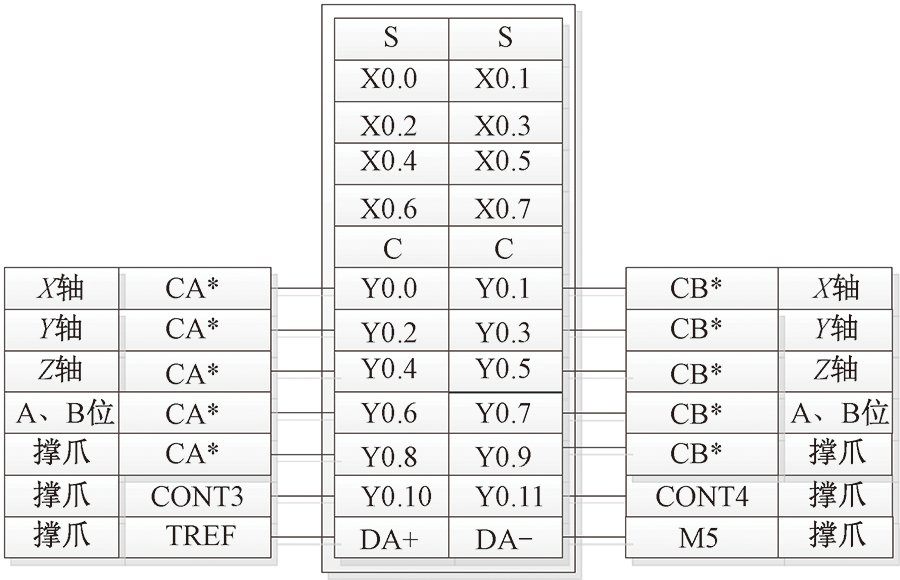
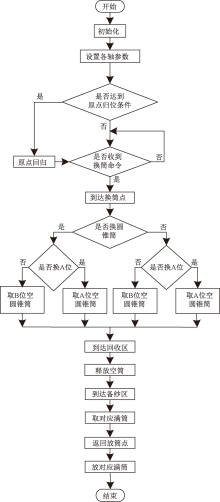
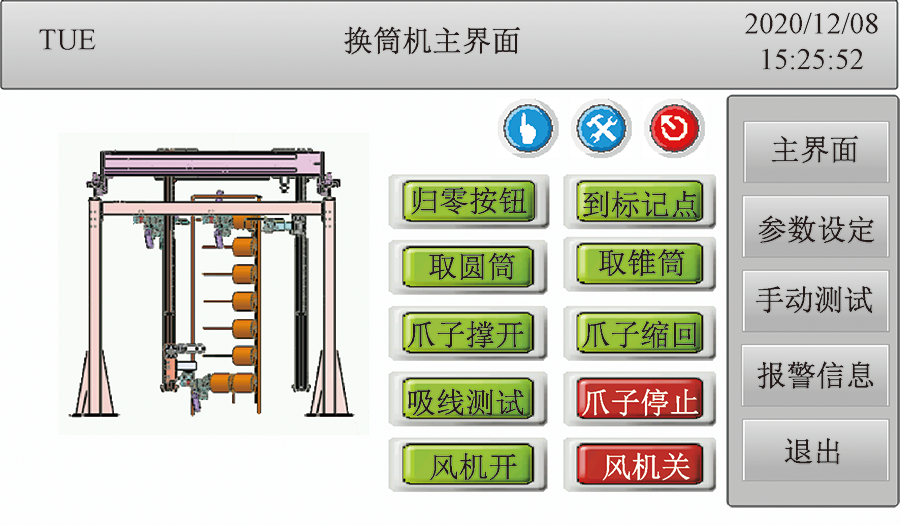
针对传统人工换筒的圆纬机存在生产自动化程度低、劳动强度大、人力成本高等问题,提出一种基于桁架机器人和换筒机械手的自动换筒方案。根据人工更换纱筒仿生工艺,结合圆纬机生产车间布局、纱架结构、纱筒类型以及换筒周期等因素,设计了桁架机器人和换筒机械手的机械结构,以及自动换筒的工艺流程和电气原理图等,并研制了实验室测试机构。最后研究了基于AS320T模块和伺服电动机的纱筒更换控制算法,实现了利用触摸屏作为人机交互界面的自动换筒功能。测试结果表明,采用此控制技术满足了圆纬机纱架自动换筒的准度、稳定性以及重复性要求,实现了以“机器换筒、人工接头”的方式为圆纬机续线,对解决传统人工换筒存在的问题具有重要意义。
中图分类号:
| [1] | 蒋高明, 高哲, 高梓越. 针织智能制造研究进展[J]. 纺织学报, 2017, 38(10): 177-183. |
| JIANG Gaoming, GAO Zhe, GAO Ziyue. Research advance of knitting intelligent manufacturing[J]. Journal of Textile Research, 2017, 38(10): 177-183. | |
| [2] | 胡旭东, 沈春娅, 彭来湖, 等. 针织装备的智能制造及互联互通标准验证[J]. 纺织学报, 2017, 38(10): 172-176. |
| HU Xudong, SHEN Chunya, PENG Laihu, et al. Intelligent manufacturing and standard about interoperability verification of knitting machine[J]. Journal of Textile Research, 2017, 38(10): 172-176. | |
| [3] | 卢茂忠, 吴载阳. 一种针织圆机用编织机: CN201811293707.0[P]. 2018-11-01. |
| LU Maozhong, WU Zaiyang. The utility model relates to a knitting machine for circular knitting machine: CN201811293707.0[P]. 2018-11-01. | |
| [4] | 邹鲲, 佘娟, 白延星. 智能纱架多机械手换纱系统设计[J]. 机床与液压, 2015, 43(3): 60-63. |
| ZOU Kun, SHE Juan, BAI Yanxing. Design of replacing yarn system of intelligent creel multi-robot[J]. Machine Tool & Hydraulics, 2015, 43(3): 60-63. | |
| [5] | 佘娟, 智能纱架的控制系统设计[D]. 上海: 东华大学, 2014:18-22. |
| SHE Juan. Design on control system of the intelligent creel robot[D]. Shanghai: Donghua University, 2014:18-22. | |
| [6] | 顾颖佳. 智能纱架机械手系统研制[D]. 上海: 东华大学, 2013:8-12. |
| GU Yingjia. The design of the system of the intelligent creel robot[D]. Shanghai: Donghua University, 2013:8-12. | |
| [7] | 张洪, 魏毅, 陈瑞, 等. 整经机筒子架自动换筒机器人系统研发[J]. 上海纺织科技, 2020, 48(6): 10-13,16. |
| ZHANG Hong, WEI Yi, CHEN Rui, et al. Research and development of automatic barrel changing robot system for warping machine's barrel frame[J]. Shanghai Textile Science & Technology, 2020, 48(6): 10-13, 16. | |
| [8] | 梅顺齐, 胡贵攀, 王建伟, 等. 纺织智能制造及其装备若干关键技术的探讨[J]. 纺织学报, 2017, 38(10): 166-171. |
| MEI Shunqi, HU Guipan, WANG Jianwei, et al. Analysis of some key technology basis for intelligent textile manufacturing and its equipment[J]. Journal of Textile Research, 2017, 38(10): 166-171. | |
| [9] | 胡旭东, 沈春娅. 针织行业的智能制造及其实践[J]. 针织工业, 2019 (8): 1-6. |
| HU Xudong, SHEN Chunya. Intelligent manufacturing and practice in knitting industry[J]. Knitting Industries, 2019 (8): 1-6. | |
| [10] | 廖能解, 马平, 李健洪, 等. 上下料桁架机器人仿真研究[J]. 机床与液压, 2019, 47(21): 9-14,33. |
| LIAO Nengjie, MA Ping, LI Jianhong, et al. Simulation study on loading and unloading material truss robot[J]. Machine Tool & Hydraulics, 2019, 47(21): 9-14, 33. | |
| [11] | 郭志良. 数控车床桁架机器人上下料系统设计研究[D]. 大连: 大连理工大学, 2019:8-10. |
| GUO Zhiliang. Design and study of gantry robot system for loading and unloading of CNC lathe[D]. Dalian: Dalian University of Technology, 2019:8-10. | |
| [12] | 杨中成. 台达高阶泛用型控制器AS300系列在全自动套袋机上的应用[J]. 智能机器人, 2018 (1): 56-58. |
| YANG Zhongcheng. Application of Delta high-order universal controller AS300 series in full-automatic bagging machine[J]. Intelligent Robot, 2018 (1): 56-58. |
| [1] | 周濛濛, 蒋高明, 高哲, 郑培晓. 纬编衬经衬纬管状织物增强复合材料研究进展[J]. 纺织学报, 2021, 42(07): 184-191. |
| [2] | 彭来湖, 王罗俊, 胡旭东, 吴振辉, 袁嫣红. 磁保持电子选针器及串行总线提花系统设计[J]. 纺织学报, 2019, 40(01): 136-141. |
| [3] | 彭来湖 吴英刚 王罗俊 胡旭东. 针织圆纬机牵拉张力闭环控制技术[J]. 纺织学报, 2018, 39(10): 125-130. |
| [4] | 戴宁 彭来湖 胡旭东 吕明来 未印. 圆纬机主动式动态送纱控制技术[J]. 纺织学报, 2018, 39(09): 153-159. |
| [5] | 彭来湖 陈青松 汝欣 胡旭东 沈春娅. 圆纬机互联互通关键技术[J]. 纺织学报, 2018, 39(05): 119-124. |
| [6] | 张东 孟婥. 纱筒残余氨的扩散过程建模与数值模拟[J]. 纺织学报, 2017, 38(09): 149-154. |
| [7] | 彭来湖 吕江东 汝欣 史伟民 向忠. 提花圆纬机花型图案嵌入式显现系统[J]. 纺织学报, 2016, 37(08): 138-142. |
| [8] | 史伟民 郭波锋 彭来湖 袁嫣红. 采用高速串行总线的圆纬机选针驱动器设计[J]. 纺织学报, 2015, 36(05): 110-114. |
| [9] | 吴晓光 孔令学 朱里 武玉琴 黄振 李爽. 磁悬浮式针织提花驱动方式理论研究与探讨[J]. 纺织学报, 2012, 33(10): 128-133. |
| [10] | 许为民;张方华. 从电脑提花圆机的研制看我国针织工业的技术创新[J]. 纺织学报, 2000, 21(04): 60-62. |
| [11] | 周罗庆. 双面纬编圆机上剖绒产品的开发[J]. 纺织学报, 1998, 19(05): 57-58. |
|
 京公网安备11010502044800号
京公网安备11010502044800号