



随着柔性电子领域的快速发展,柔性智能可穿戴设备逐渐成为研究热点[1-
相较于离子凝胶,蚕丝织物具有天然的生物相容性。通过磁控溅射、真空蒸发镀膜等技术,可对蚕丝织物进行修饰,使其获得优异的电学性能,因此蚕丝织物可作为表面电容式触控设备的理想基体[21-22]。然而,上述改性策略大都为物理改性,存在织物基体与导电层界面牢度低的瓶颈问题,在穿戴过程中易引起导电层破损,影响织物触控性能的稳定性[21-
本文以蚕丝织物为基底,水性聚氨酯/多壁碳纳米管为导电材料,通过层压涂敷工艺,制备表面电容式触摸电子织物。研究导电水性聚氨酯流变性能的变化规律,表征触摸电子织物的微观形貌。进一步探究柔性触摸电子织物的触控定位原理,分析其触摸性能,如响应时间及耐久性等。基于此,开发出柔性织物触控键盘,可实现远程触控交互功能,在智能可穿戴领域具有广阔的应用前景。
1 实验部分
1.1 实验材料
蚕丝机织物(面密度为146.39 g/m2),湖州伦盛纺织品有限公司;导电多壁碳纳米管(纯度大于95%)、异弗尔酮二异氰酸酯(IPDI,纯度大于99%)、聚四氢呋喃(PTMG,数均分子量约为2 000)、2,2-二羟甲基丙酸(DMPA,纯度大于98%)、1,4-丁二醇(BDO,纯度大于99%)、三乙胺(TEA,纯度大于99%)、二月桂酸二丁基锡(DBTDL,纯度大于95%)、丙酮(分析纯),上海麦克林生化科技股份有限公司;去离子水,实验室自制。
1.2 样品制备
1.2.1 水性聚氨酯的合成
在热水浴环境(65 ℃)中将0.04 mol IPDI与0.01 mol PTMG混合,采用高速搅拌器对混合溶液进行搅拌(500 r/min,1.5 h),期间加入DBTDL(10 μL)以加快反应速度。随后,升温至80 ℃继续反应1.5 h。进一步,在相同条件下,加入1.8 g DMPA与0.5 mL BDO进行3 h的扩链反应。待反应完全后,加入TEA(15 μL)以中和混合溶液酸性环境(45 ℃,500 r/min,20 min)。最后加入去离子水进行乳化(1 200 r/min,20 min),得到分散均匀的水性聚氨酯乳液。实验通过添加丙酮调控体系黏度以抑制爆聚,且实验全程在密闭三颈烧瓶中进行,并借助冷凝管实现挥发性物质回流,确保反应稳定进行。
1.2.2 导电性聚氨酯混合浆料的制备
分别将0.8、1.3 mol的导电多壁碳纳米管加入6.7 mL水性聚氨酯中,用高速搅拌器对混合溶液搅拌(800 r/min,20 min),得到固含量为16%和26%的均匀导电浆料。除特殊说明,后续实验均采用16%固含量的导电浆料制备织物。
1.2.3 触摸电子织物的制备
将蚕丝织物固定在涂敷机上,设置涂敷厚度为0.5 mm,将导电浆料涂敷在蚕丝织物基底上,经多道罗拉工艺处理使浆料均匀分布于织物表面后,置于80 ℃真空烘箱干燥20 min,得到纺织基触摸电子织物。
1.3 测试与表征
1.3.1 化学结构表征
采用 Nicolet iS10 傅里叶变换红外光谱仪(美国赛默飞世尔科技有限公司)探究水性聚氨酯合成过程中的官能团变化。扫描波数范围为4 000~400 cm-1,分辨率为4 cm-1,扫描32次。
1.3.2 黏度测试
采用 MCR702 高级流变仪(奥地利安东帕公司)对水性聚氨酯/多壁碳纳米管混合浆料的黏度进行测试。设置测试黏度范围为0.01 ~10 000 mPa·s。
1.3.3 表面形貌观察
采用 JEOL JSM-840 扫描电子显微镜(日本电子株式会社)观察织物的微观形貌。测试前通过 ETD-800 离子溅射仪(北京欧波同光学技术有限公司)对织物表面进行喷金处理1 min。
1.3.4 触摸性能测试
采用 GA1651A 信号发生器(深圳市安泰信科技有限公司)提供实验所需高频交流电信号。选用织物柔性电极连接触摸电子织物与相关器件。使用 34461A 台式万用表(安捷伦科技有限责任公司)测试织物的触摸电流变化。
1)触摸定位测试。首先在触摸电子织物两侧施加相同的高频交流电(±450 mV, 10 kHz),待器件稳定后触摸织物表面,自一端间隔采点至另一端,每次触摸持续3 s,得到织物两端的电流-距离变化曲线。样品尺寸为140 mm×50 mm×1 mm,采点间隔为10 mm。
2)响应时间测试。在织物两端通入交流电,待织物电流达到基线状态且稳定后,触摸织物中点,并持续2 s,随后撤去手指,待电流恢复到基线状态时,得到触摸响应时间。
3)触摸稳定性测试。在织物两端通入相同的高频交流电,待触摸电子织物表面电场稳定后,连续触摸织物中点,每次触摸停留1 s并观察电流变化情况。
4)触摸耐久性测试。在织物两端通入相同的高频交流电,待触摸电子织物表面电场稳定后,分别触摸放置不同时间的触摸电子织物中点,每次触摸持续5 s,得到电流变化曲线,分析测试前后的电流差异。
5)形变不灵敏性测试。在织物两端通入相同的高频交流电,待触摸电子织物表面电场稳定,弯曲不同角度后测试触摸电子织物中点电流变化。
2 结果与分析
2.1 触摸电子织物的材料分析
2.1.1 水性聚氨酯的化学结构分析
 的吸收峰消失,说明反应组分中的异氰酸酯基团已经完全反应。3 500~3 100 cm-1处出现氨基甲酸酯基中—N—H的伸缩振动峰,同时1 701 cm-1处出现
的吸收峰消失,说明反应组分中的异氰酸酯基团已经完全反应。3 500~3 100 cm-1处出现氨基甲酸酯基中—N—H的伸缩振动峰,同时1 701 cm-1处出现  (与氢键结合)伸缩振动峰,表明合成了氨基甲酸酯基。1 101 cm-1处为—C—O—C—的吸收振动峰,这是由水性聚氨酯中软链段聚四氢呋喃(PTMG)提供的,表明水性聚氨酯被成功合成[
(与氢键结合)伸缩振动峰,表明合成了氨基甲酸酯基。1 101 cm-1处为—C—O—C—的吸收振动峰,这是由水性聚氨酯中软链段聚四氢呋喃(PTMG)提供的,表明水性聚氨酯被成功合成[图1
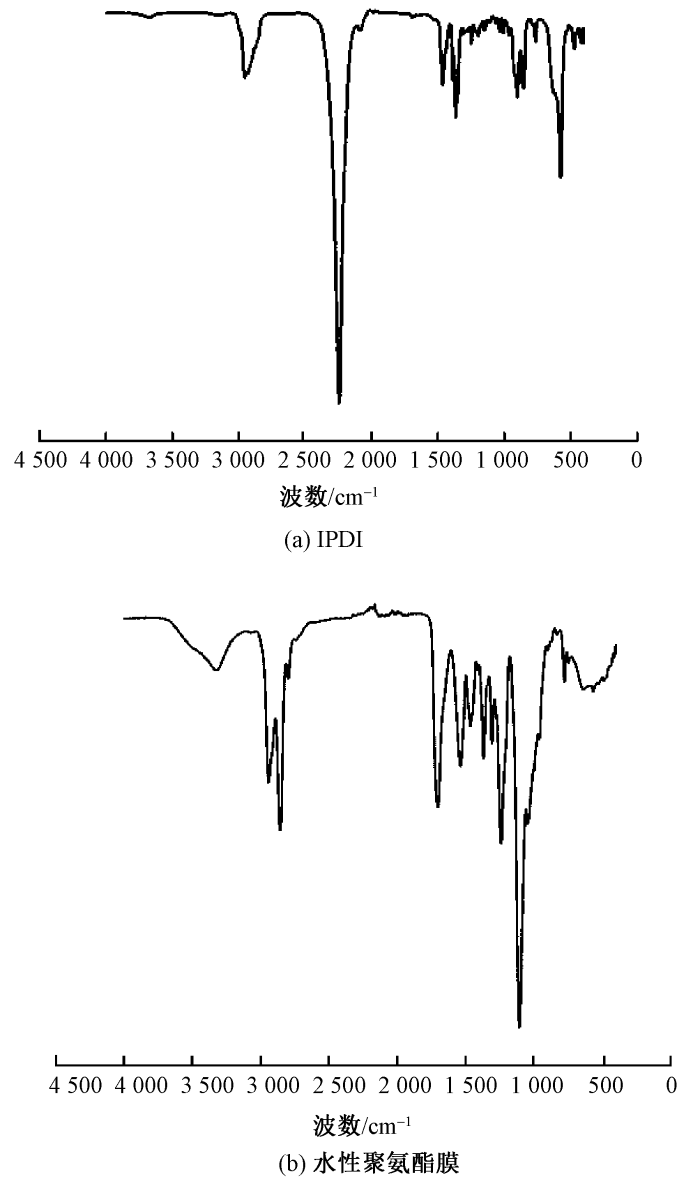
图1
IPDI和水性聚氨酯薄膜的傅里叶变换红外光谱图
Fig.1
Fourier transform infrared spectroscopy of IPDI (a) and waterborne polyurethane films (b)
2.1.2 导电水性聚氨酯混合浆料的黏度分析
纯水性聚氨酯的黏度为0.017 Pa·s(剪切率为10 s-1),黏度较低,易渗透到电子织物内,难以在织物表面形成均匀的薄膜。图2示出导电水性聚氨酯混合浆料的流变性能。可知,随着多壁碳纳米管固含量的提升,导电浆料的黏度呈现明显的上升趋势。当多壁碳纳米管固含量为16%时,导电浆料的流变性能优异,可在织物表面形成均匀的导电浆膜。此时导电浆料的黏度为1.22 Pa·s(剪切速度为10 s-1)。然而,当多壁碳纳米管固含量继续增大至26%时,导电浆料的黏度迅速提升达到8.96 Pa·s(剪切速率为10 s-1),导致浆膜均匀性变差,影响触摸电子织物表面电阻均匀性,因此,本文采用多壁碳纳米管固含量为16%作为制备触摸电子织物的导电浆料。
图2
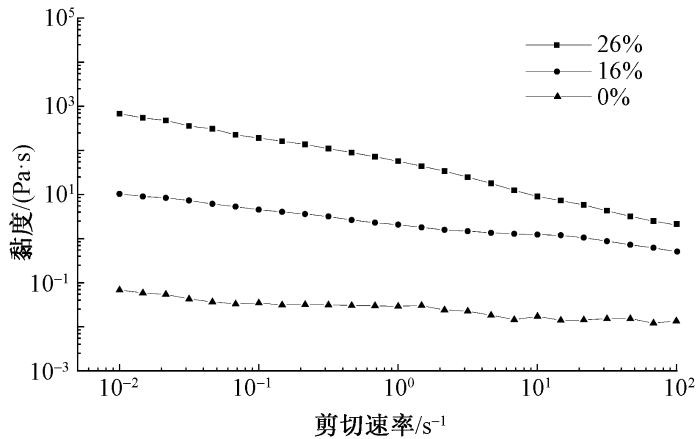
图2
不同多壁碳纳米管固含量的导电水性聚氨酯混合浆料的流变性能
Fig.2
Rheological properties of conductive waterborne polyurethanes mixed slurry with different content of MWCNT
2.1.3 织物表观形貌分析
触摸电子织物的表观形貌照片如图3所示。水性聚氨酯/多壁碳纳米管混合浆料可在织物表面形成一层均匀的导电薄膜,并且由于机织基底的多孔特性,导电薄膜可与纤维相互缠结,从而提高导电浆膜与织物基体的牢度。
图3
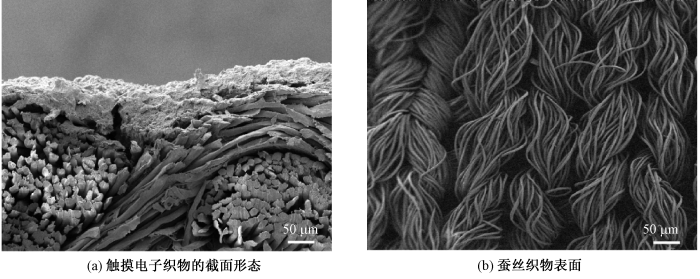
图3
触摸电子织物的微观形貌照片
Fig.3
Microscopic morphology of touch electronics fabrics. (a)Cross-sectional morphology of touch electronic fabric;(b)Silk fabric surface
2.2 触模电子织物的触摸性能分析
2.2.1 触摸原理分析
图4为触摸电子织物触摸原理示意图。初始状态下,触摸电子织物未受到外界电场刺激,此时织物内部电子呈现随机分布状态。随后,在织物两端施加相同的高频交流电,织物内部电子在电场刺激下重排运动,呈现均匀分布状态。此时,电子织物被极化,与大地形成寄生电容,织物两端的电流表监测到基线电流产生。待基线电流稳定后,人体触碰到电子织物表面,在触摸界面处形成手指-电子织物的耦合电容微结构,导致触摸点处电势降低,引起电子织物内的电子做定向运动,呈现聚集态分布,激发出触摸电流。当手指离开织物表面时,织物内电子在外界电场刺激下又恢复到均匀态,电流恢复到基线水平,从而实现触控功能。
图4
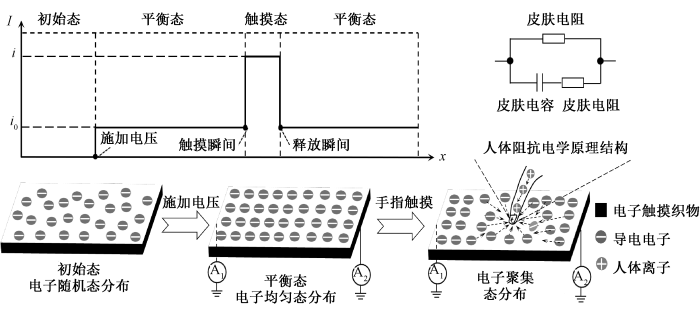
图4
触摸电子织物触摸原理示意图
Fig.4
Schematic diagram of touch principle of touch electronics fabrics
为验证上述原理,选取触摸电子织物上的11个点(相邻点间隔10 mm)作为测试点,监测织物两端触摸电流的变化(I1、I2)。图5示出触摸电子织物的电流变化规律。可知,当手指依次从A1端至A2触摸时,A1处观察到的触摸电流I1呈阶梯式下降(由18.46 μA下降至13.21 μA),而A2处所观察的触摸电流I2呈阶梯式增加(由13.44 μA增加至18.62 μA)。此外,每个点A1与A2所监测到的触摸电流之和为定值(31.9 μA)。由此可知,触摸电流大小取决于触摸点距电极的距离。触摸点与电极间距越小,则该点的触摸电流越大;相反,另一触摸电流则越小。
图5
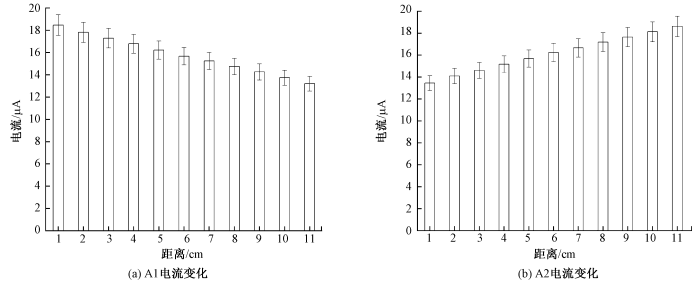
图5
触摸电子织物的电流变化规律
Fig.5
Current change law of touch electronic fabricss. (a)Change in current of A1; (b)Change in current of A2
2.2.2 响应时间分析
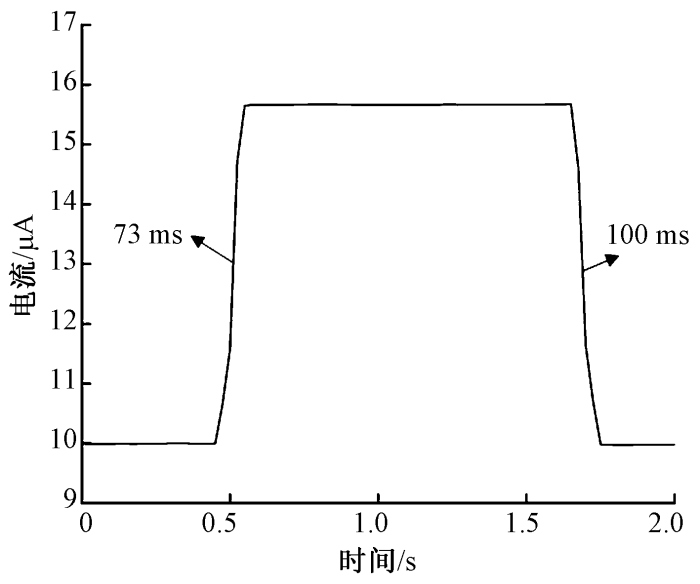
图6示出触摸电子织物的响应时间。选取触摸电子织物中点作为测试点,当人体触摸织物中点时,触摸电流I1由9.77 μA增加到16.23 μA,响应时间为73 ms。当手指移开后,触摸电流恢复到9.76 μA,回复时间为100 ms。上述结果证明触摸电子织物具有优异的响应时间。
图6
2.2.3 触摸稳定性分析
选取触摸电子织物中点作为测试点,连续触摸织物中点1、50、100、300、500次后,观察触摸电流的变化趋势。结果表明,A1端电流表触摸电流平均值分别为16.736、16.735、16.733、16.734、16.735 μA,最大变化率仅为0.118%,证明触摸电子织物具有优异的触摸稳定性。
2.2.4 触摸耐久性分析
选择织物中点作为触摸点,监测同一织物放置0、5、10、15、30、60 d后的触摸电流变化情况。结果表明,A1处监测到的触摸电流分别为16.658、16.660、16.661、16.661、16.660 μA,最大电流变化率小于1.5%。上述结果证明触摸电子织物具有优异的耐久性。
2.2.5 形变不灵敏性分析
为证明触摸电子织物具有优异的形变不灵敏特性,分别对触摸电子织物施加30°、60°、90°、120°、150°、180°的弯曲角度后,触摸织物中点,观察不同弯曲角度触摸电流的变化。结果表明,未施加形变时,A1处监测的织物中点触摸电流为16.867 μA;随着形变角度的增加,触摸电流分别为17.119、17.071、16.757、16.985、17.178及16.736 μA,最大波动仅为5%。上述结果表明,触摸电子织物具有形变不灵敏特性,在可穿戴交互领域具有极大的应用潜力。
2.3 触摸电子织物的应用
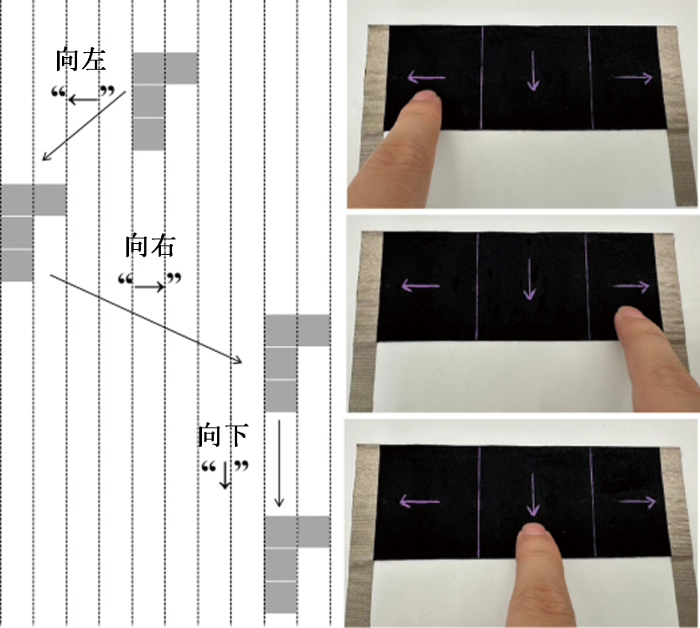
基于触摸电子织物触控性能,可将触摸电子织物应用于柔性键盘的开发。图7示出触控电子织物的触控交互。将触控织物等间距分为3份,对应键盘中的“←”“↓”“→”。同时通过电路将织物与电脑连接,充当游戏俄罗斯方块的控制部分,当点击对应“↓”,则方块下落。基于此功能可以通过对触摸电子织物划分不同的区域,实现界面交互的功能。
图7
3 结论
本文制备了一种以蚕丝织物为基体、水性聚氨酯/多壁碳纳米管为导电浆料的纺织基触摸电子织物,克服了传统离子凝胶类触控设备的生物相容性差、界面牢度低等瓶颈问题。蚕丝触摸电子织物具有优异的触摸传感特性,如高精度触摸定位功能、优异的响应速度、触摸稳定性及触摸耐久性等。此外,触摸电子织物还具有形变不灵敏特性,在多次弯折形变后,织物的触摸电流仍能维持恒定。在此基础上,开发出一种织物控制界面,可实现触摸游戏控制,其在智能可穿戴人机交互领域具有广阔的应用前景。
参考文献
Advanced design of fibrous flexible actuators for smart wearable applications
[J].
Smart contact lenses: from rational design strategies to wearable health monitoring
[J].
Engineering smart composite hydrogels for wearable disease monitoring
[J].
Anti-drying, transparent, ion-conducting, and tough organohydrogels for wearable multifunctional human-machine interfaces
[J].
A fully flexible intelligent thermal touch panel based on intrinsically plastic Ag2S semiconductor
[J].
Irregular microdome structure-based sensitive pressure sensor using internal popping of microspheres
[J].
聚乳酸非织造基材触摸传感电子织物制备及其性能
[J].
Preparation and properties of polyactic acid nonwoven substrate touch-sensing electronic textile
[J].
Reconfigurable touch panel based on a conductive thixotropic supramolecular hydrogel
[J].
Development of a touch sensor capable of touch and touch load recognition
[J].
Pixel-free capacitive touch sensor using a single-layer ion gel
[J].
All-in-one piezoresistive-sensing patch integrated with micro-supercapacitor
[J].
Soft piezoresistive pressure sensing matrix from copper nanowires composite aerogel
[J].
Graphene-based stretchable/wearable self-powered touch sensor
[J].
DOI:10.1016/j.nanoen.2019.05.039
[本文引用: 1]

Wearable electronic devices have become familiar to people and have been expanded to various functions via development in the field of the flexible and stretchable electronic devices. These wearable devices, such as displays, motion sensors, electromyography sensors, and electrocardiogram sensors, require input and power systems to command information and supply energy, respectively. The triboelectric nanogenerator (TENG) has attracted attention as an eco-friendly device that provides sustainable power without an external power supply. Here, we report a self-powered stretchable TENG (S-TENG) touch sensor suitable for a wearable device that adapts to the skin's motion because of its stretchability. The S-TENG with a single-electrode structure was fabricated using atomically thin graphene (< 1 nm), polyethylene terephthalate (similar to 5 mu m), and polydimethylsiloxane (similar to 5 mu m) as the electrode, substrate, and electrification layer, respectively. The stretchability was realized through an auxetic mesh design, which helps to obtain stable mechanical and electrical properties while stretching. The S-TENG touch sensor not only senses the touch point but can also perform improved extended functions such as detection of touch sliding velocity and information input through the trajectory mode. The developed S-TENG touch sensor showed good potential for future wearable input applications and is capable of long-term performance without an energy supply.
A self-powered, high-precision and minimum-channel touch panel coupling triboelectrification and uniform resistance film
[J].
Spray-coating thin films on three-dimensional surfaces for a semitransparent capacitive-touch device
[J].
New surface capacitive touchscreen technology to detect DNA
[J].
Environmentally friendly graphene inks for touch screen sensors
[J].
Skin-inspired self-healing semiconductive touch panel based on novel transparent stretchable hydrogels
[J].
Temperature tolerant all-solid-state touch panel with high stretchablity, transparency and self-healing ability
[J].
Ultra-stretchable self-healing composite hydrogels as touch panel
[J].
ALD based nanostructured zinc oxide coated antiviral silk fabric
[J].
Multifunctional surface modification of mulberry silk fabric via PNIPAAm/Chitosan/PEO nanofibers coating and cross-linking technology
[J].
Flexible, wearable multilayer piezoresistive sensor based on mulberry silk fabric for human movement and health detection
[J].
The preparation of high solid content waterborne polyurethane by special physical blending
[J].
Fabrication and characterization of waterborne polyurethane/silver nanocomposite foams
[J].
Evaluating the characteristics of multiwall carbon nanotubes
[J].
Visible-light induced synthesis of biocompatible porous polymers from oligocarbonatedimethacrylate (OCM-2) in the presence of dialkyl phthalates
[J].
Enhancement of the adhesion strength of water-based ink binder based on waterborne polyurethane
[J].

 京公网安备11010502044800号
京公网安备11010502044800号{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}