纺织学报 ›› 2020, Vol. 41 ›› Issue (09): 143-148.doi: 10.13475/j.fzxb.20191205906
丁彩红( ), 李署程, 吴喜如
), 李署程, 吴喜如
DING Caihong(), LI Shucheng, WU Xiru
摘要:
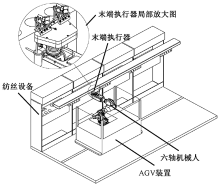
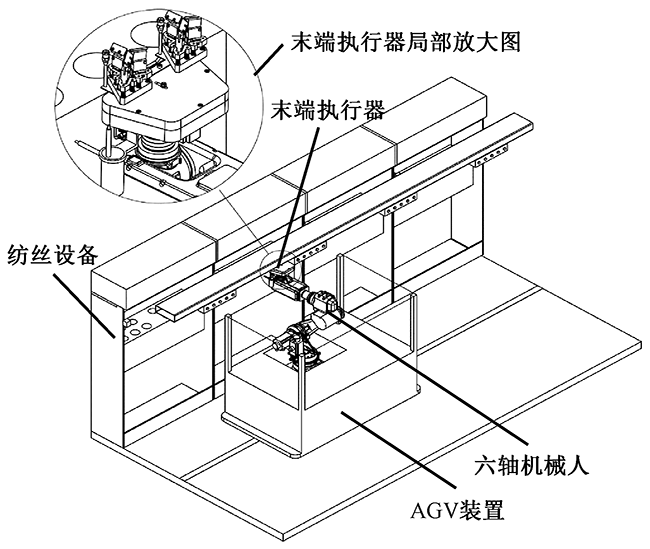
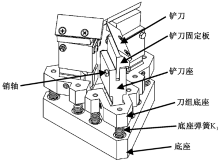
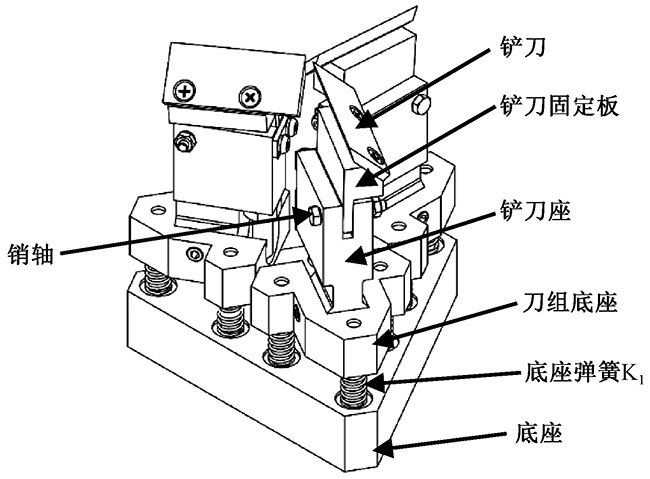
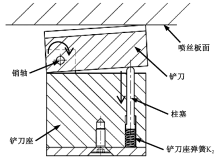
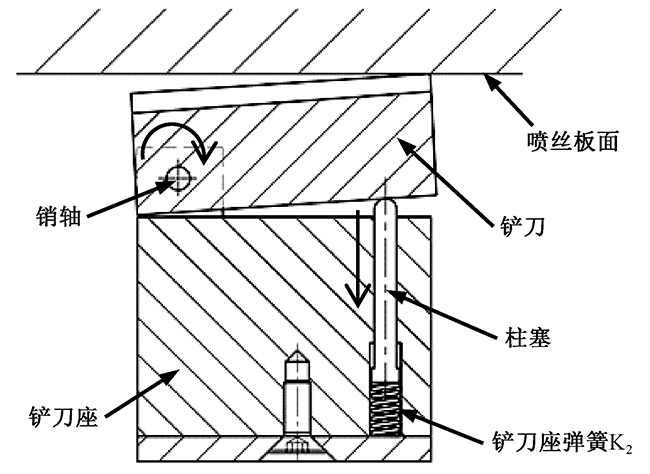
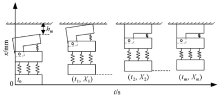
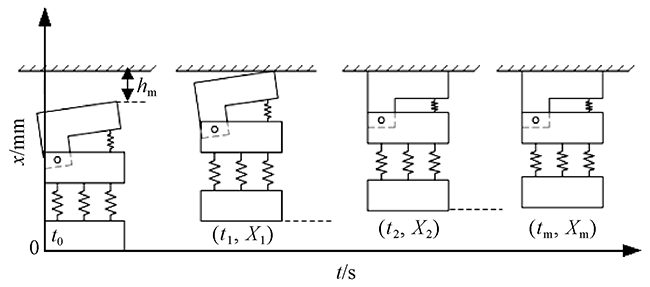
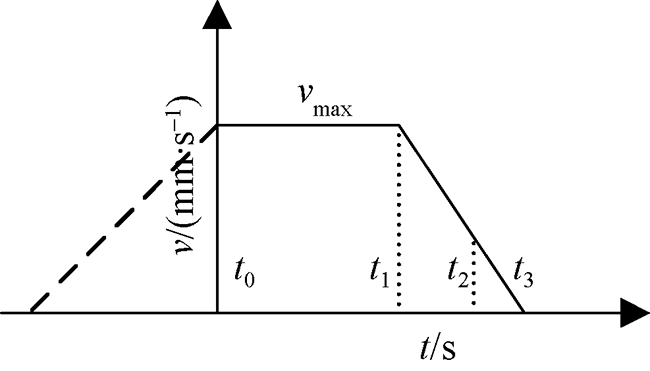
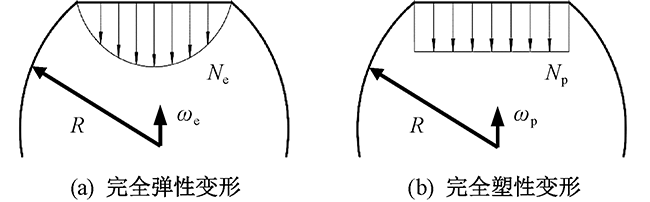
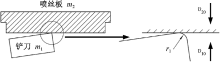
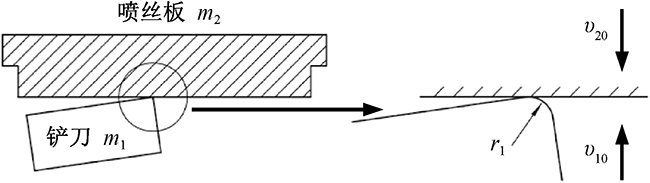
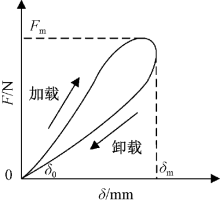
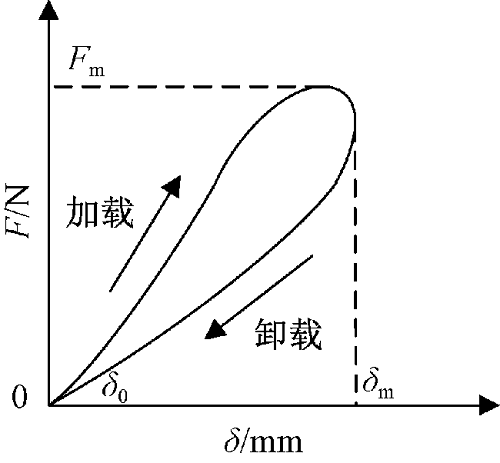
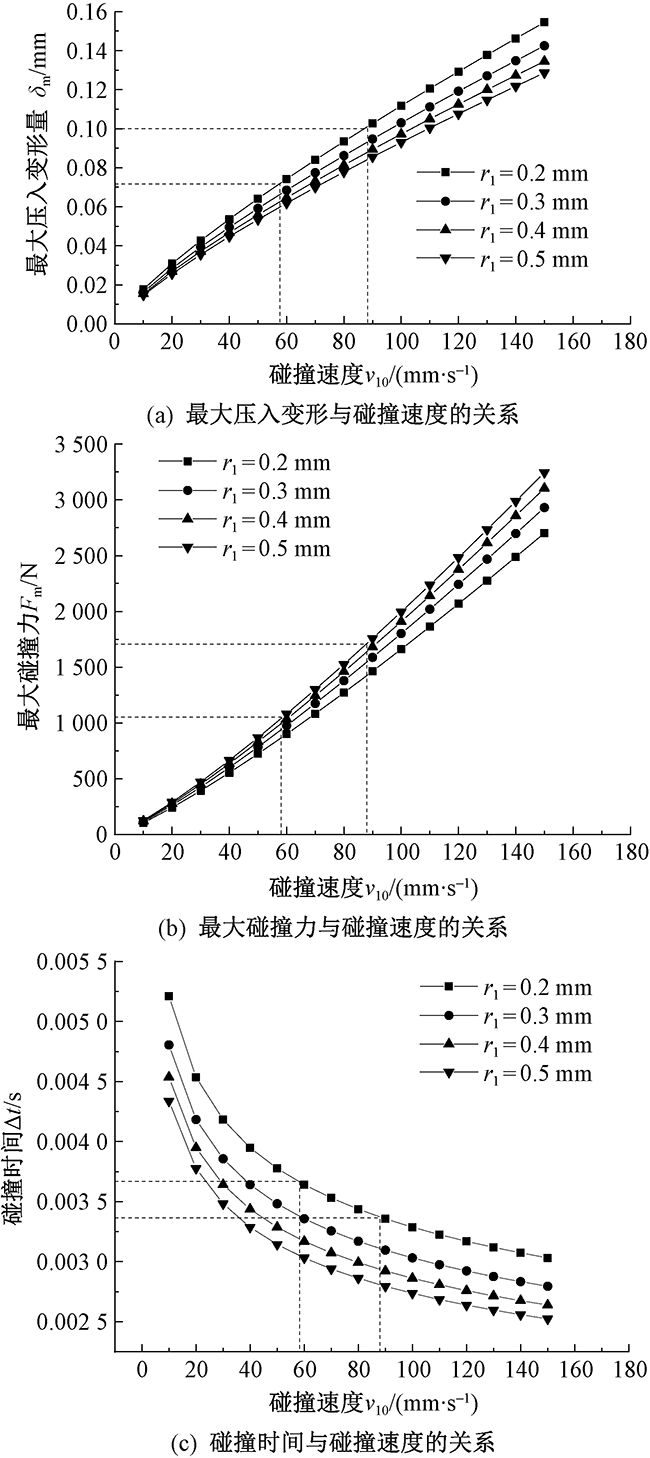
为实现自动化铲板过程中铲刀快速接近并压紧在喷丝板面而不损伤铲刀或者喷丝板面,需对对刀运动进行运动参数规划。通过分析自动化铲板运动过程,描述对刀运动的4个阶段连续运动,提出对刀运动的梯形速度控制曲线设计方案;应用Hertz接触理论建立铲刀和喷丝板面的接触力学模型,对铲刀和喷丝板面的受损难易程度进行定性分析,确定以不损伤铲刀刀刃为对刀运动参数设计的依据;通过接触碰撞分析建立铲刀与喷丝板面之间的碰撞力、碰撞变形、碰撞时间与碰撞速度之间的数学关系式。最后以曲率半径为0.2 mm的铲刀刀刃(最大损伤变形0.1 mm)为例,应用MatLab计算得到对刀运动的最大允许碰撞速度和碰撞力,完成对刀运动的参数设计,为铲板组件缓冲结构的详细设计提供参考。
中图分类号:
| [1] | 于勤, 王强, 范雪荣. 二醋酸纤维素纤维纺丝溶液的挤出胀大行为[J]. 纺织学报, 2015, 36(4):7-10. |
| YU Qin, WANG Qiang, FAN Xuerong. Die swell behavior of cellulose diacetate spinning dope[J]. Journal of Textile Research, 2015, 36(4):7-10. | |
| [2] | 周凤玲. 影响刮板质量因素的探讨[J]. 化纤与纺织技术, 2008(3):7-8. |
| ZHOU Fengling. Influencing factors of spinneret cleaning[J]. Chemical Fiber and Textile Technology, 2008(3):7-8. | |
| [3] | YU W D. Estimation of single-fibre tensile properties from the bundle tensile curve of polyester fibres[J]. Journal of Donghua University (English Edition), 2004, 21(1):18-23. |
| [4] | 张家春. 一种自动清板系统:201610682902.7 [P]. 2016-08-17. |
| ZHANG Jiachun. An automatic plate cleaning system:201610682902.7[P]. 2016-08-17. | |
| [5] | 卢贤生. 一种喷丝面板清洁装置:201510932405.3[P]. 2015-12-15. |
| LU Xiansheng. A spinning panel cleaning device: 201510932405.3[P]. 2015-12-15. | |
| [6] | 宫川敬史, 川崎秀一, 本仪守之, 等. 纺丝喷嘴清理装置和纺丝机的清理方法:200410062876.5[P]. 2004-06-29. |
| TAKASHI Miyagawa, MORIYUKI Motogi, SHUICHI Kawasaki, et al. Spinning nozzle cleaning device and spinning machine cleaning method: 200410062876.5[P]. 2004-06-29. | |
| [7] | 王云飞, 郎需林, 张承瑞, 等. 高速并联机械手最优加减速控制算法研究[J]. 机械设计与制造, 2014(11):85-88. |
| WANG Yunfei, LANG Xulin, ZHANG Chengrui, et al. The optimal acceleration-seceleration control research of high-speed parallel manipulator[J]. Machinery Design and Manufacture, 2014(11):85-88. | |
| [8] |
JACKSON R L, STREATOR J L. A multi-scale model for contact between rough surfaces[J]. Wear, 2007, 262(5/6):624-662.
doi: 10.1016/j.wear.2006.07.007 |
| [9] | 瓦伦丁 L 波波夫. 接触力学与摩擦学的原理及其应用[M]. 李强, 雒建斌, 译. 北京: 清华大学出版社, 2011: 47-50. |
| VALENTIN L P. Mechanics and friction physical principles and applications [M]. LI Qiang, LUO Jianbin, Translating. Beijing: Tsinghua University Press, 2011: 47-50. | |
| [10] |
CHANG W R, ETSION I, BOGY D B. An elastic-plastic model for the contact of rough surfaces[J]. Journal of Tribology, 1987, 109(2):257-263.
doi: 10.1115/1.3261348 |
| [11] | KOGUTL, ETSION I. Elastic-plastic contact analysis of a sphere and a rigid flat[J]. Journal of Applied Mechanics, 2002, 69(5):657. |
| [12] | LIU P, ZHAO H, HUANG K, et al. Research on normal contact stiffness of rough surface considering friction based on fractal theory[J]. Applied Surface Science, 2015, 349:43-48. |
| [13] | 运睿德, 丁北. 考虑多尺度接触状态的新接触模型[J]. 机械工程学报, 2019(9):80-89. |
| YUN Ruide, DING Bei. New fractal contact model considered multi-scale levels[J]. Journal of Mechanical Engineering, 2019(9):80-89. | |
| [14] | 金栋平, 胡海岩. 碰撞振动与控制[M]. 3版. 北京: 科学出版社, 2005: 36-39. |
| JIN Dongping, HU Haiyan. Collision vibration and control[M]. 3rd ed. Beijing: Science Press, 2005: 36-39. | |
| [15] | LANKARANI H M, NIKRAVESH P E. Continuous contact force models for impact analysis in multibody systems[J]. Nonlinear Dynamics, 1994, 5(2):193-207. |
| [1] | 丁彩红, 李署程, 季兴跃. 基于缓冲对刀策略的自动化铲板组件设计[J]. 纺织学报, 2020, 41(04): 155-160. |
| [2] | 郭隽侠 陶建峰 刘成良. 应用改进蚁群算法的同心分布喷丝孔检测路径规划[J]. 纺织学报, 2017, 38(11): 124-130. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号