纺织学报 ›› 2020, Vol. 41 ›› Issue (12): 137-143.doi: 10.13475/j.fzxb.20200300607
张文昌1,2, 单忠德1( ), 卢影2
), 卢影2
ZHANG Wenchang1,2, SHAN Zhongde1(), LU Ying2
摘要:
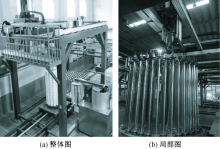
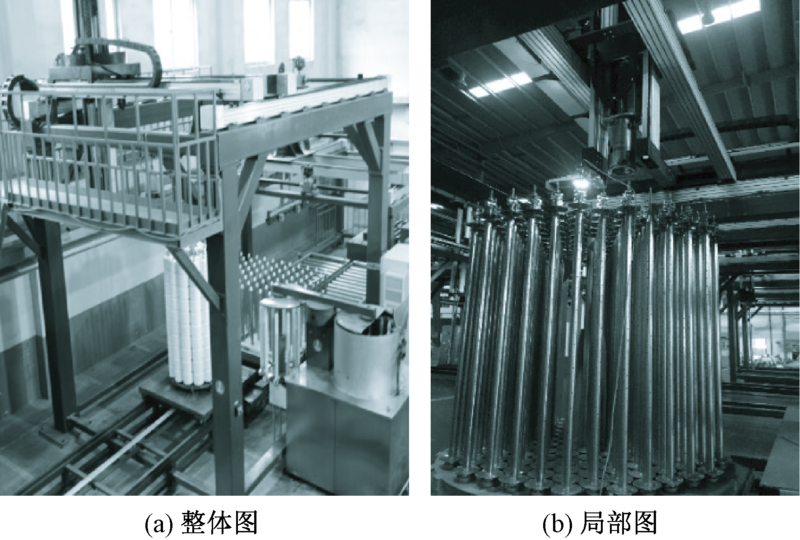
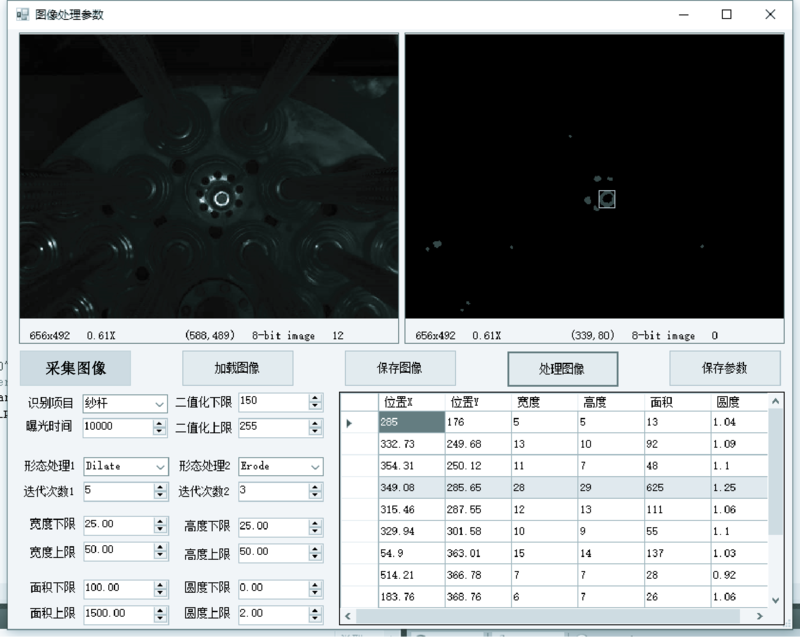
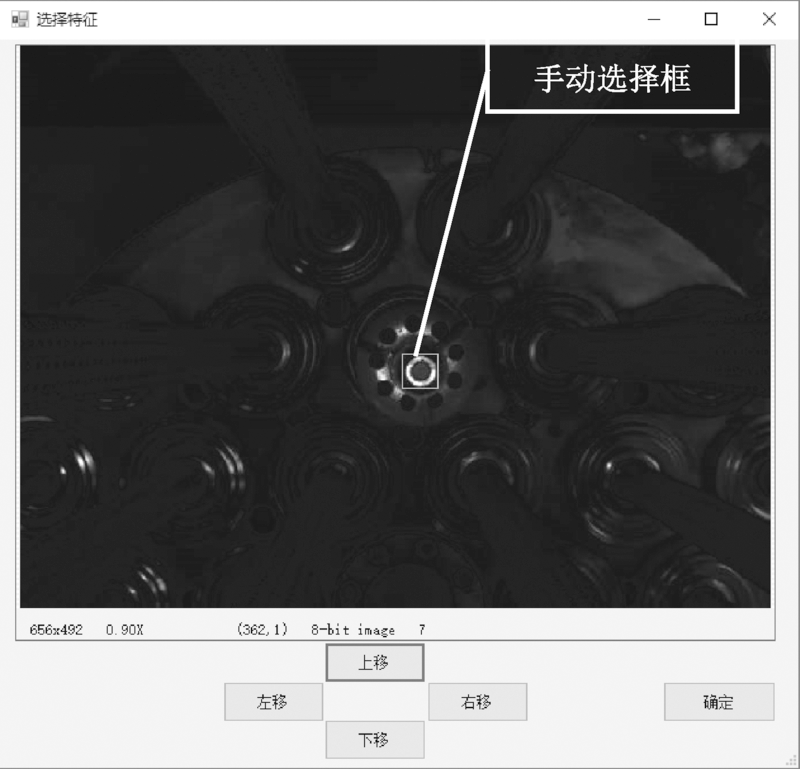
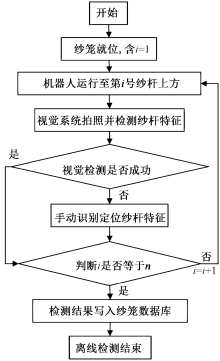
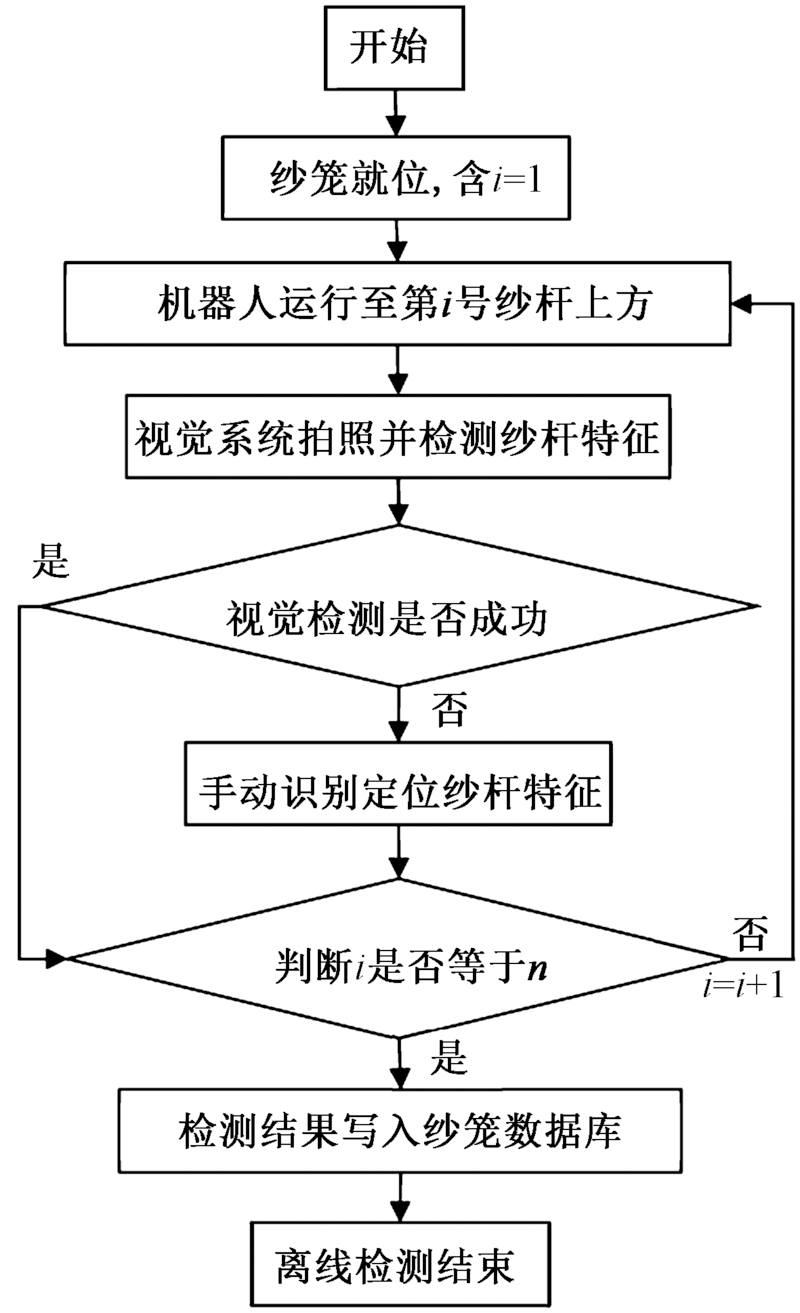
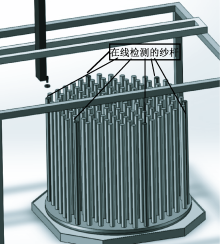
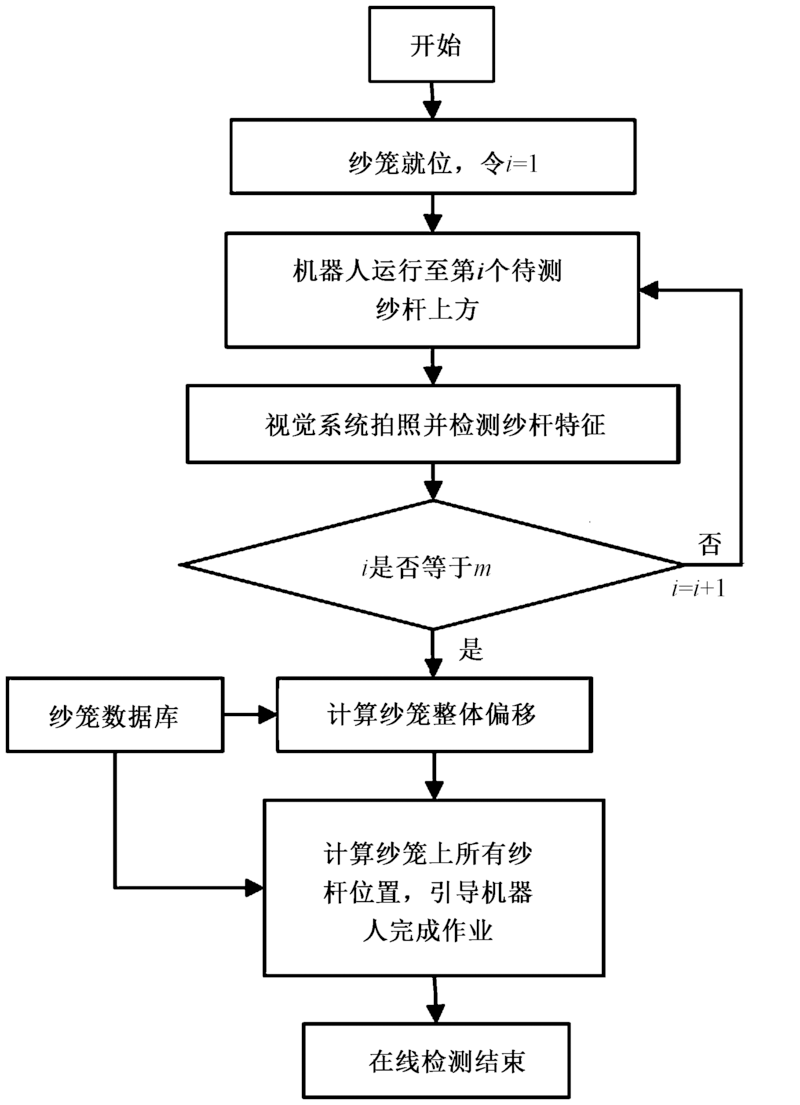
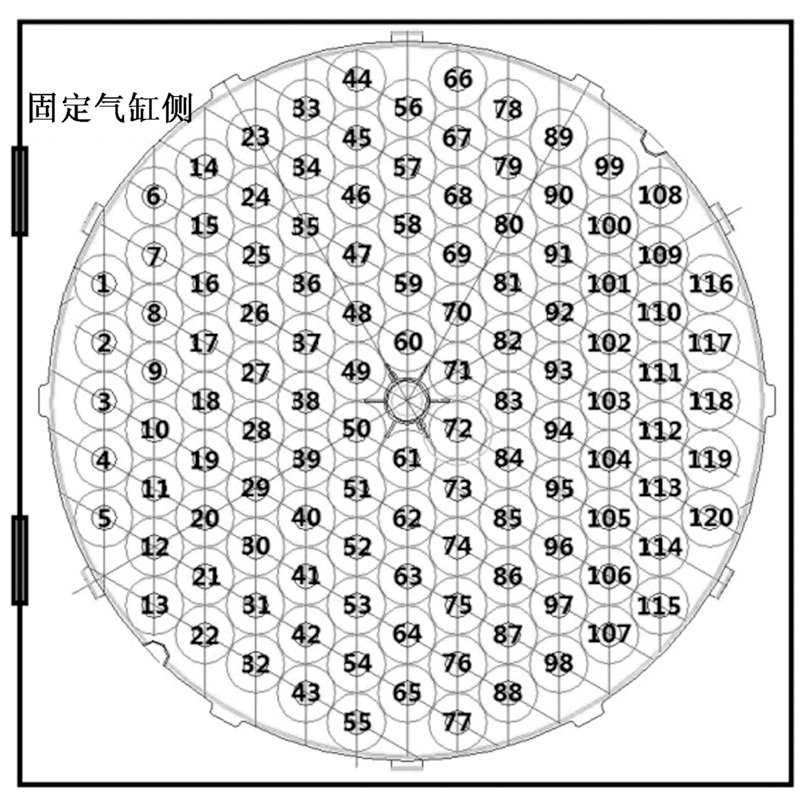
为实现纺织印染过程全流程自动化、数字化、智能化生产,针对纺织印染行业大尺寸纱笼上密集纱杆数字化精确定位问题,提出一种离线检测与在线检测相结合的数字化视觉定位方法。该方法将单目工业相机安装在机器人末端,离线检测单元在非生产时间时对纱笼上的纱杆位置进行定位检测,并将纱笼上所有纱杆的位置信息记录到数据库中;在线检测单元在生产过程中对纱笼上少数几个纱杆进行定位检测,结合离线检测的纱杆位置信息,采用最小二乘法计算得到纱笼的整体位姿偏移,然后根据纱笼位姿偏移计算得到所有纱杆的位置信息,从而引导机器人完成相应的取放作业。实验表明,该方法定位准确,鲁棒性强,生产中占用节拍少,实用性强。
中图分类号:
| [1] | 吴双峰, 单忠德, 王德成, 等. 染色工序经轴纱自动装卸夹持器设计[J]. 毛纺科技, 2018,46(5):1-4. |
| WU Shuangfeng, SHAN Zhongde, WANG Decheng, et al. Design of automatic loading and unloading warp beam holder in dyeing process[J]. Wool Textile Journal, 2019,46(5):1-4. | |
| [2] | 蔡逸超, 周晓, 宋明峰, 等. 应用多尺度多方向模板卷积的筒子纱缺陷检测[J]. 纺织学报, 2019,40(4):152-157. |
| CAI Yichao, ZHOU Xiao, SONG Mingfeng, et al. Defect detection of cheese yarn bsed on multi-scale multi-direction template convolution[J]. Journal of Textile Research, 2019,40(4):152-157. | |
| [3] | WANG Weichien, CHEN Liangbi, CHANG Wangjung, et al. A machine vision based automatic optical inspection system for measuring drilling quality of printed circuit boards[J]. IEEE Access, 2017,5:10817-10833. |
| [4] |
CHANDRA S N, BIPAN T, CHIRANJIB K. A machine vision-based maturity prediction system for sorting of harvested mangoes[J]. IEEE Transactions on Instrumentation and Measurement, 2014,63(7):1722-1730.
doi: 10.1109/TIM.2014.2299527 |
| [5] |
ZHANG Wenchang, MEI Jiangping, DING Yabin, et al. Angle recognition algorithm based on discrete series data of object-boundary in polar coordinate[J]. Optik, 2013,124:1273-1277.
doi: 10.1016/j.ijleo.2012.03.025 |
| [6] | ZHANG Wenchang, WANG Ronghao, JI Lijuan, et al. High precise position method based on 2 CCD cameras in alternate-angle image acquisition mode[C]// 2018 IEEE International Conference on Mechatronics, Robotics and Automation (ICMRA). Hefei: IEEE, 2018,21(6):946-949. |
| [7] | 朱永国, 张文博, 邓正平, 等. 基于激光跟踪仪和机器视觉的飞机翼身对接装配偏差动态综合修正[J]. 机械工程学报, 2018,55(24):187-196. |
| ZHU Yongguo, ZHANG Wenbo, DENG Zhengping, et al. Dynamic sysjournal correction of deviation for aircraft wing-fuselage checking assembly based on laser tracker and machine vision[J]. Journal of Mechanical Engineering, 2018,55(24):187-196. | |
| [8] | GU Fengwei, GAO Hongwei, LIU Jingguo, et al. Research on static vision-based target localization for astronaut assistant robots[J]. IEEE Access, 2019,7:128394-128407. |
| [9] | KUO Yonglin, LIU Bohan, WU Chunyu, et al. Pose determination of a robot manipulator based on monocular vision[J]. IEEE Access, 2014,4:8454-8464. |
| [10] | FRANK Chen. Robot manipulation of 3D cylindrical objects with a robot-mounted 2D vision camera[C]// 2017 Computing Conference. London: IEEE, 2017: 192-199. |
| [11] | ROMULO G L, SIDNEY N G, PAULO R G K, Vision-based measurement for localization of objects in 3-D for robotic applications[J]. IEEE Transactions on Instrumentation and Measurement, 2016,64(11):2950-2958. |
| [12] | 季旭全, 王君臣, 赵江地, 等. 基于机器人和视觉引导的星载设备智能装配方法[J]. 机械工程学报, 2018,54(23):63-72. |
| JI Xuquan, WANG Junchen, ZHAO Jiangdi, et al. Intelligent robotic assembly method of spaceborne equipment based on visual guidance[J]. Journal of Mechanical Engineering, 2018,54(23):63-72. |
| [1] | 沈津竹, 赵晓露, 张帆, 俞青, 苏军强. 柔性康复手套设计与工效性评价[J]. 纺织学报, 2020, 41(09): 119-127. |
| [2] | 李珣, 南恺恺, 赵征凡, 王晓华, 景军锋. 多智能体博弈的纺织车间搬运机器人任务分配[J]. 纺织学报, 2020, 41(07): 78-87. |
| [3] | 张建新, 李琦. 基于机器视觉的筒子纱密度在线检测系统[J]. 纺织学报, 2020, 41(06): 141-146. |
| [4] | 刘建宝, 李平, 金福江, 梅小华. 多辊型整纬器改进方案及其实践[J]. 纺织学报, 2020, 41(06): 153-160. |
| [5] | 周虎, 刘涛, 高金杰, 周强, 罗滨鸿, 游政, 苏炳望, 巴拉. 手工地毯植绒机轨迹规划及其速度控制优化[J]. 纺织学报, 2019, 40(10): 177-182. |
| [6] | 任荟颖, 邹鲲, 胡小荣. 化纤长丝自动落卷系统仿真平台开发[J]. 纺织学报, 2019, 40(07): 151-157. |
| [7] | 金肖克 田伟 朱炜婧 蒋晶晶 祝成炎. 基于高光谱成像系统的纺织品成分定性鉴别[J]. 纺织学报, 2018, 39(10): 50-57. |
| [8] | 常永和 薛元 韩晨晨 杨瑞华 高卫东 张毅. 环锭纺导纱板受力信号在线检测及纺纱张力分析[J]. 纺织学报, 2018, 39(09): 146-152. |
| [9] | 田俊杰 张李超 赵星 白宇 . 纺织品图案主结构的快速提取方法[J]. 纺织学报, 2018, 39(04): 137-143. |
| [10] | 李霞 杜磊 许明月 方园 邹奉元. 应用电子鼻技术的鹅绒与鸭绒区分[J]. 纺织学报, 2018, 39(04): 19-23. |
| [11] | 牟新刚 蔡逸超 周晓 陈国良. 基于机器视觉的筒子纱缺陷在线检测系统[J]. 纺织学报, 2018, 39(01): 139-145. |
| [12] | 吕汉明 王晓叶 马崇启. 基于电容传感器的醋酸纤维含油率检测[J]. 纺织学报, 2017, 38(06): 106-110. |
| [13] | 李强 杨艺 刘基宏 高娜. 赛络纺粗纱断纱在线检测[J]. 纺织学报, 2016, 37(10): 120-0124. |
| [14] | 宋晓亮 刘建立 徐阳 刘基宏 高卫东. 光电式环锭断纱在线检测系统[J]. 纺织学报, 2014, 35(8): 94-0. |
| [15] | 管瑜 张毅 于坤 邵路. 样本质量对近红外法预测远红外纤维含量的影响[J]. 纺织学报, 2014, 35(5): 19-0. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号