纺织学报 ›› 2025, Vol. 46 ›› Issue (10): 206-216.doi: 10.13475/j.fzxb.20241104601
刘宜胜, 熊俊康, 戴宁( ), 胡旭东
), 胡旭东
LIU Yisheng, XIONG Junkang, DAI Ning(), HU Xudong
摘要:
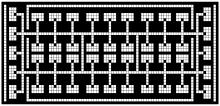
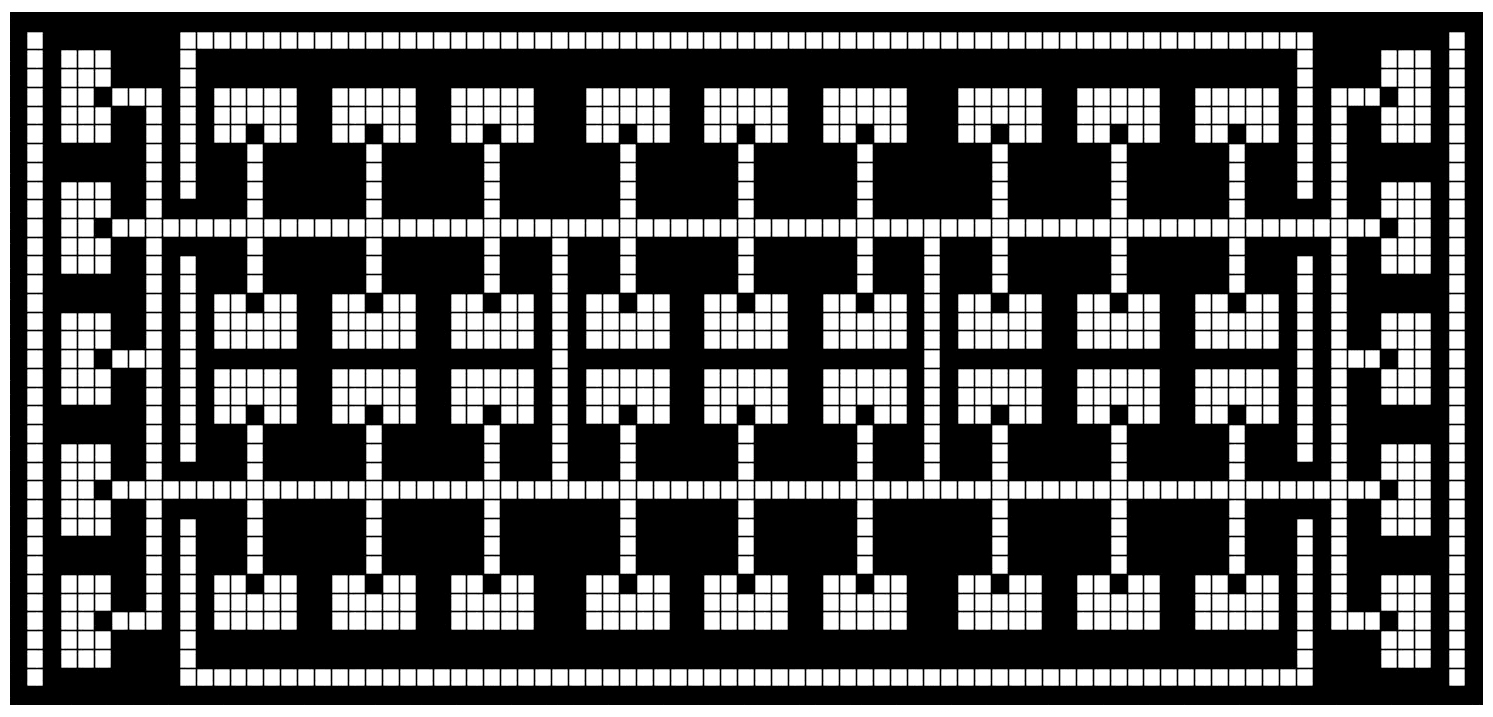
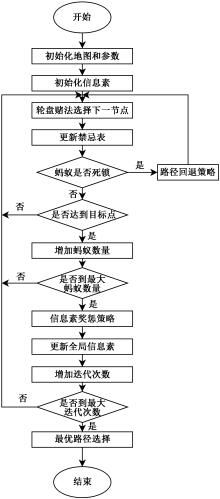
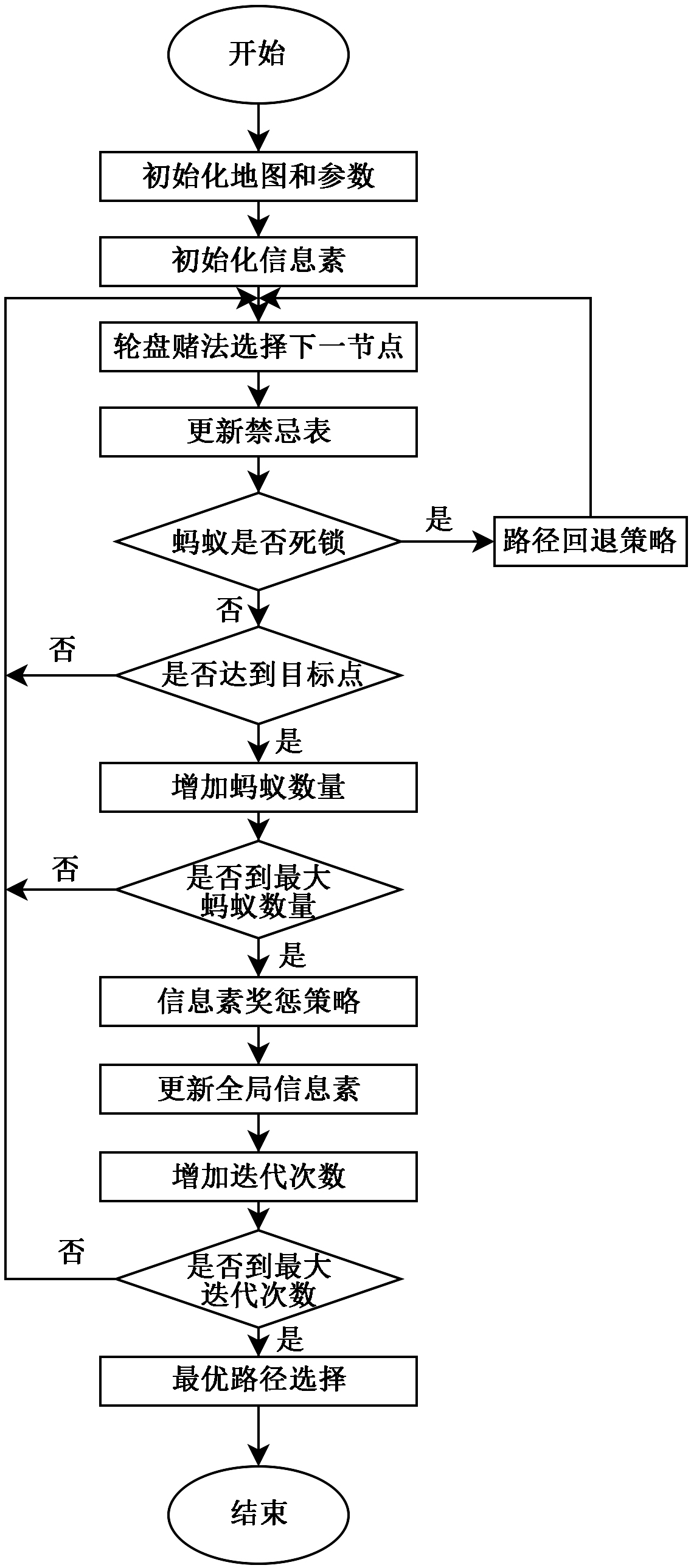
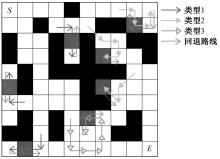
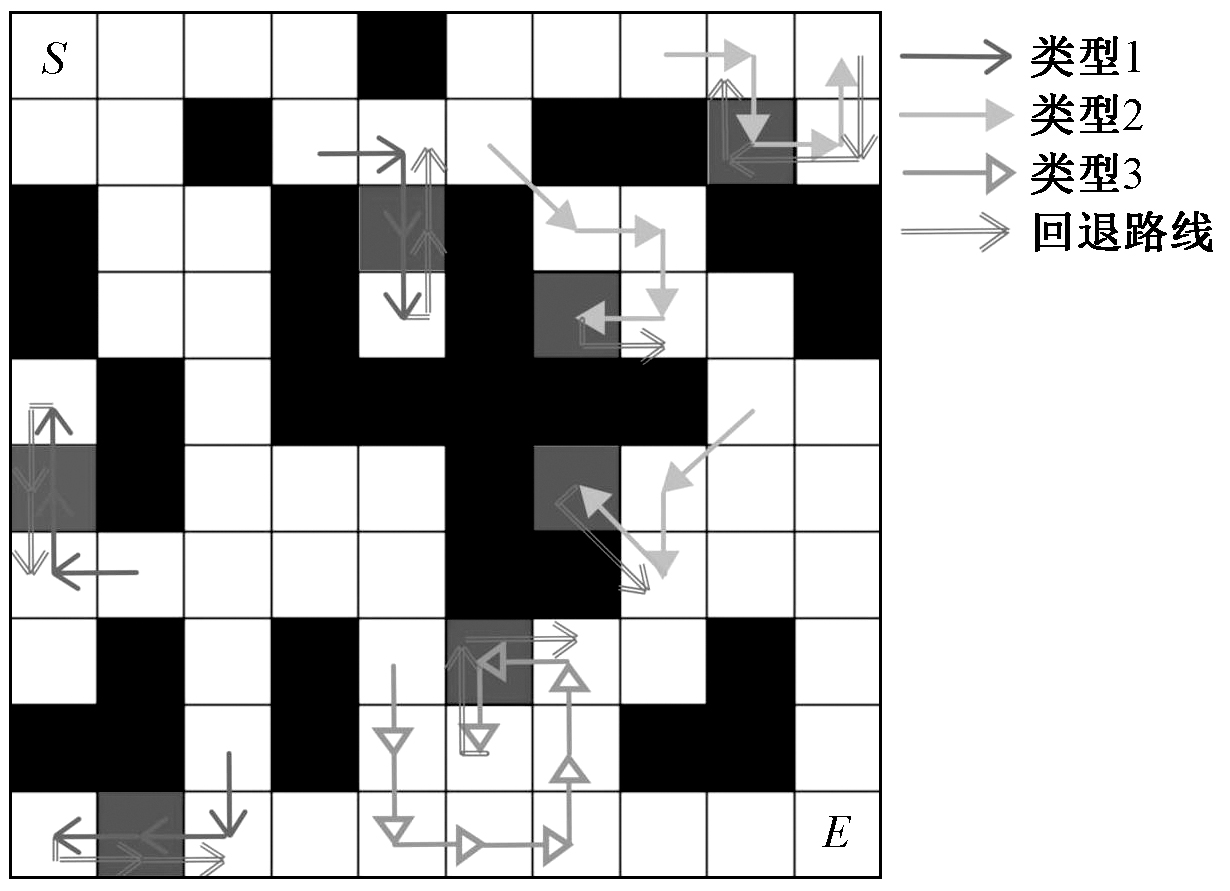
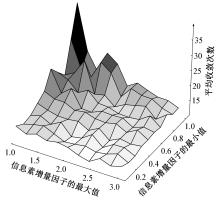
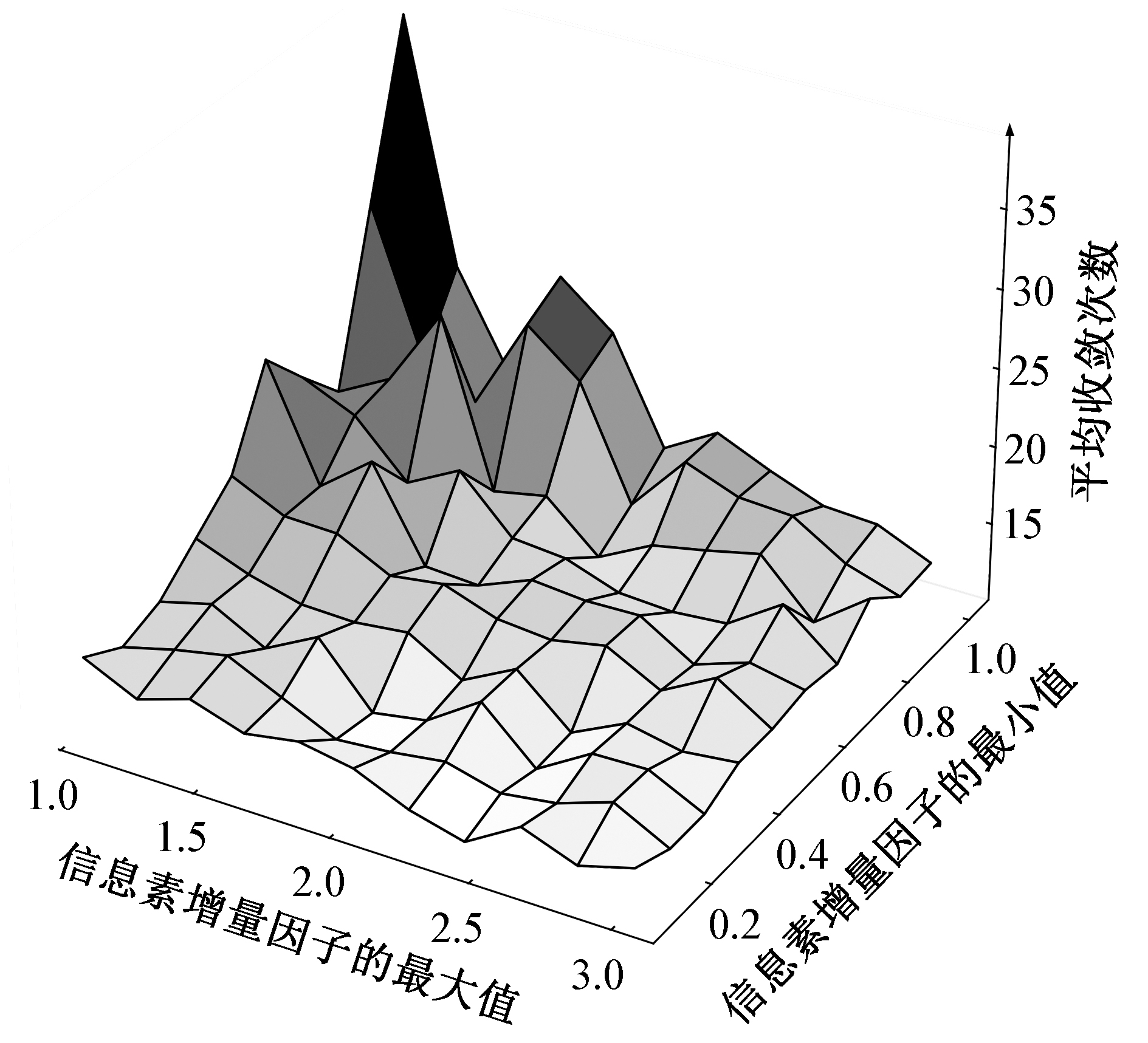
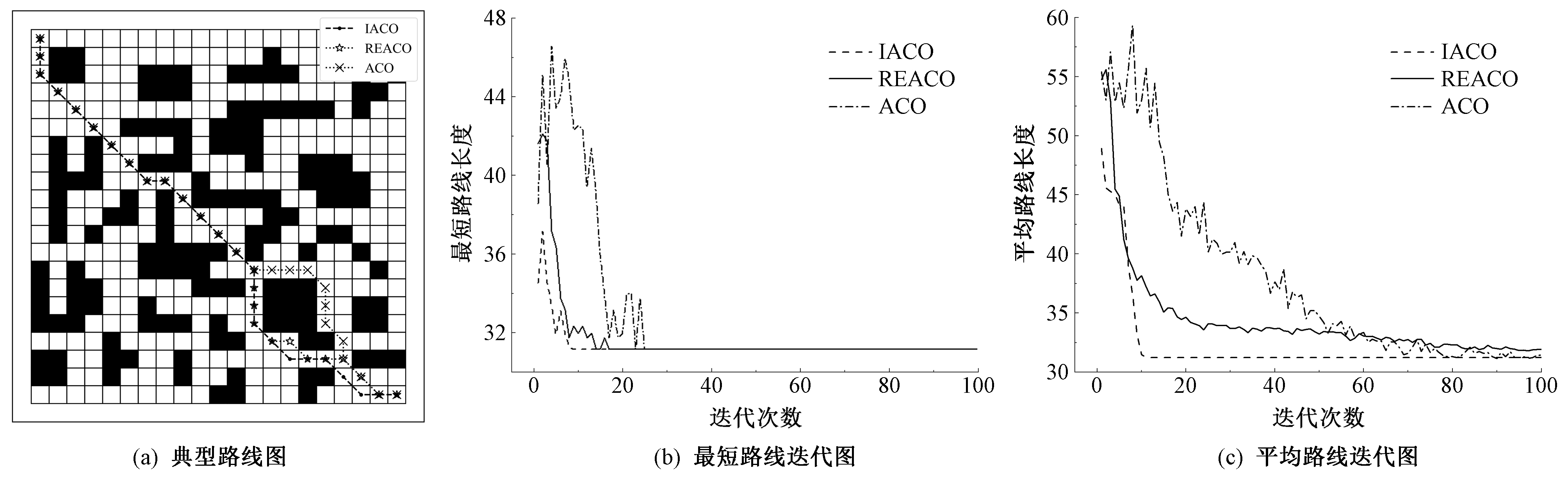
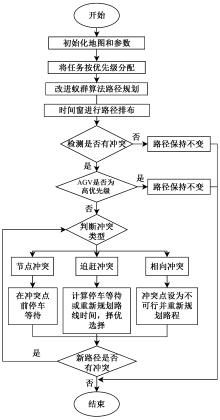
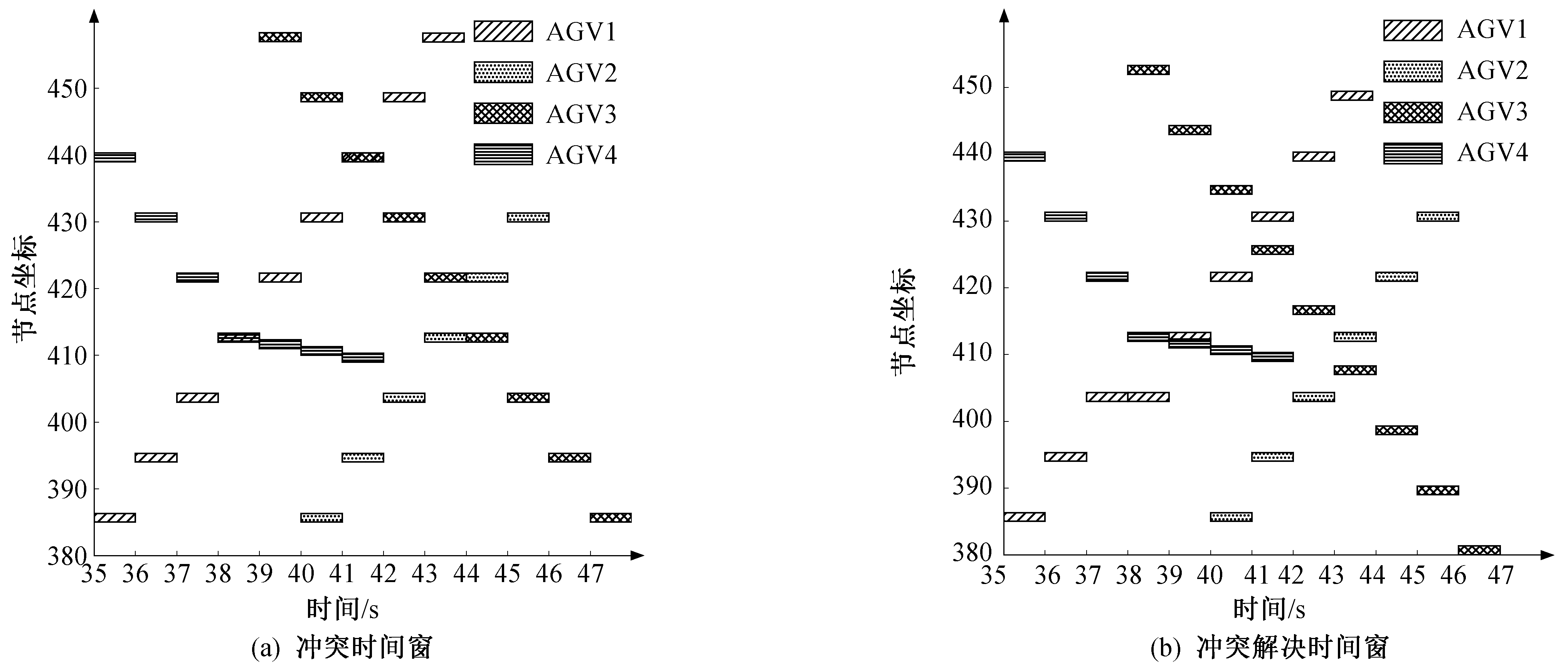
纺纱车间中的多辆自动引导车(AGV)路径规划问题,涉及到单辆AGV的路径规划算法和多辆AGV的冲突策略,基于蚁群算法对单辆AGV进行路径规划,针对该算法易陷入死锁、转角较多和收敛迭代较慢的缺点,提出蚁群路径回溯策略、信息素增量奖惩以及转角引导优化措施。实验结果表明:在复杂环境的同等条件下,改进算法的死锁数量为基础算法的16.4%,收敛迭代次数为27.1%,路线的转角次数均达到全局最优。针对多辆AGV的冲突策略,使用优先级和时间窗融合算法,用优先级分配搬运任务,时间窗算法检测分类冲突类型,对不同的冲突类型进行处理。验证结果表明,融合算法可识别并处理纺纱车间中的多AGV冲突问题。该方法在纺纱车间的多AGV路径协同规划中具有较高的应用价值。
中图分类号:
| [1] | 高卫东, 孙丰鑫. 棉纺织科技发展现状及展望[J]. 棉纺织技术, 2019, 47(9): 1-6. |
| GAO Weidong, SUN Fengxin. Current status and prospect of cotton spinning technology development[J]. Cotton Textile Technology, 2019, 47(9): 1-6. | |
| [2] | 徐旻. 我国棉纺行业智能制造的发展方向探讨[J]. 棉纺织技术, 2016, 44(5): 76-79. |
| XU Min. Discussion on the development direction of intelligent manufacturing in China's cotton spinning industry[J]. Journal of Cotton Textile Technology, 2016, 44(5): 76-79. | |
| [3] | 陈俊彬. AGV小车的发展现状研究[J]. 科技资讯, 2023, 21(15): 237-240. |
| CHEN Junbin. Research on the current development status of AGV carts[J]. Science and Technology Information, 2023, 21(15): 237-240. | |
| [4] |
TAO Q, SANG H, GUO H, et al. Improved particle swarm optimization algorithm for AGV path planning[J]. IEEE Access, 2021, 9: 33522-33531.
doi: 10.1109/ACCESS.2021.3061288 |
| [5] |
WU L, LIU Q, TIAN X, et al. A new improved fruit fly optimization algorithm IAFOA and its application to solve engineering optimization problems[J]. Knowledge-based Systems, 2018, 144: 153-173.
doi: 10.1016/j.knosys.2017.12.031 |
| [6] |
LI W, XIA L, HUANG Y, et al. An ant colony optimization algorithm with adaptive greedy strategy to optimize path problems[J]. Journal of Ambient Intelligence and Humanized Computing, 2022, 13(3): 1557-1571.
doi: 10.1007/s12652-021-03120-0 |
| [7] | MA Y, MAO Z Y, WANG T, et al. Obstacle avoidance path planning of unmanned submarine vehicle in ocean current environment based on improved firework-ant colony algorithm[J]. Computers & Electrical Engineering, 2020, 87: 106773. |
| [8] |
AJEIL F H, IBRAHEEM I K, AZAR A T, et al. Grid-based mobile robot path planning using aging-based ant colony optimization algorithm in static and dynamic environments[J]. Sensors, 2020, 20(7): 880-906.
doi: 10.3390/s20030880 |
| [9] |
LIU J H, YANG J G, LIU H, et al. An improved ant colony algorithm for robot path planning[J]. Soft Computing, 2016, 21(19): 5829-5839.
doi: 10.1007/s00500-016-2161-7 |
| [10] | ZHU S N, ZHU W Y, ZHANG X, et al. Path planning of lunar robot based on dynamic adaptive ant colony algorithm and obstacle avoidance[J]. International Journal of Advanced Robotic Systems, 2020, 17(3): 4149-4171. |
| [11] |
WU L, HUANG X, CUI J, et al. Modified adaptive ant colony optimization algorithm and its application for solving path planning of mobile robot[J]. Expert Systems with Applications, 2023, 215: 119410.
doi: 10.1016/j.eswa.2022.119410 |
| [12] |
MIAO C W, CHEN G Z, YAN C, et al. Path planning optimization of indoor mobile robot based on adaptive ant colony algorithm[J]. Computers and Industrial Engineering, 2021, 156: 107230.
doi: 10.1016/j.cie.2021.107230 |
| [13] |
LIU C, WU L, XIAO W, et al. An improved heuristic mechanism ant colony optimization algorithm for solving path planning[J]. Knowledge-based Systems, 2023, 271: 110540.
doi: 10.1016/j.knosys.2023.110540 |
| [14] | ZHOU S, CHENG G, MENG Q, et al. Development of multi-sensor information fusion and AGV navigation system[C]// 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC).Chongqing:IEEE, 2020: 2043-2046. |
| [15] |
LUO Q, WANG H, ZHENG Y, et al. Research on path planning of mobile robot based on improved ant colony algorithm[J]. Neural Computing and Applications, 2020, 32: 1555-1566.
doi: 10.1007/s00521-019-04172-2 |
| [16] |
WU G, SUN X. AGV task distribution study[J]. Journal of Physics: Conference Series, 2020, 1486(7): 072016.
doi: 10.1088/1742-6596/1486/7/072016 |
| [17] |
SMOLIC-ROCAK N, BOGDAN S, KOVACIC Z, et al. Time windows based dynamic routing in multi-AGV systems[J]. IEEE Transactions on Automation Science and Engineering, 2009, 7(1): 151-155.
doi: 10.1109/TASE.2009.2016350 |
| [18] | DEMESURE G, DEFOORT M, BEKRAR A, et al. Navigation scheme with priority-based scheduling of mobile agents: application to AGV-based flexible manufacturing system[J]. Journal of Intelligent & Robotic Systems, 2016, 82(3): 495-512. |
| [1] | 纪杰, 韩云龙, 高杰, 汪虎明, 陆彪. 纺纱车间空调系统数学建模及动态仿真[J]. 纺织学报, 2022, 43(03): 176-184. |
| [2] | 张苏宁, 王泽, 马大力. 基于改进蚁群算法的Flexsim衬衣流水线仿真优化[J]. 纺织学报, 2021, 42(03): 155-160. |
| [3] | 郑小虎, 鲍劲松, 马清文, 周衡, 张良山. 基于模拟退火遗传算法的纺纱车间调度系统[J]. 纺织学报, 2020, 41(06): 36-41. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号