纺织学报 ›› 2022, Vol. 43 ›› Issue (05): 163-169.doi: 10.13475/j.fzxb.20210504407
周其洪1,2( ), 彭轶1,2, 岑均豪3, 周申华1, 李姝佳1
), 彭轶1,2, 岑均豪3, 周申华1, 李姝佳1
ZHOU Qihong1,2(), PENG Yi1,2, CEN Junhao3, ZHOU Shenhua1, LI Shujia1
摘要:
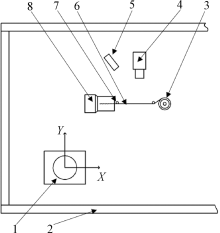
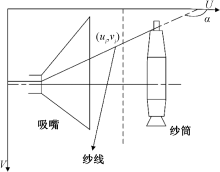
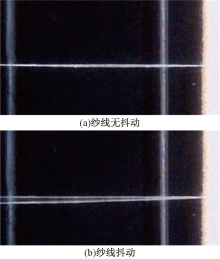
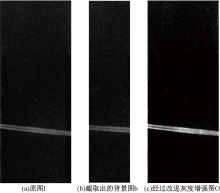
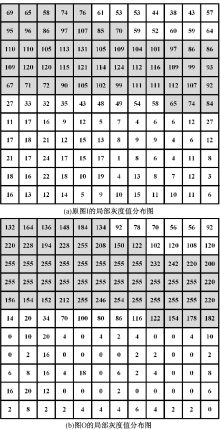
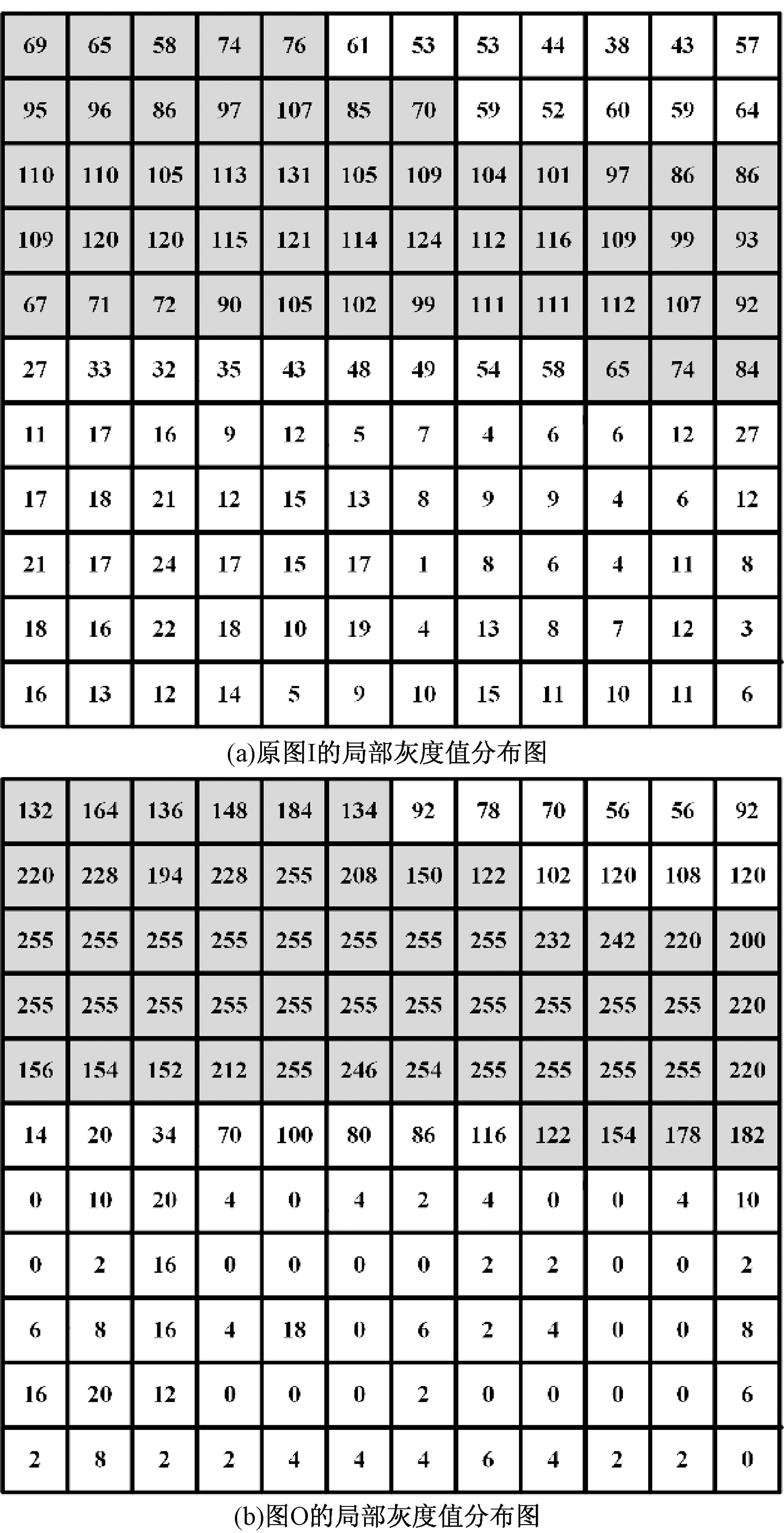
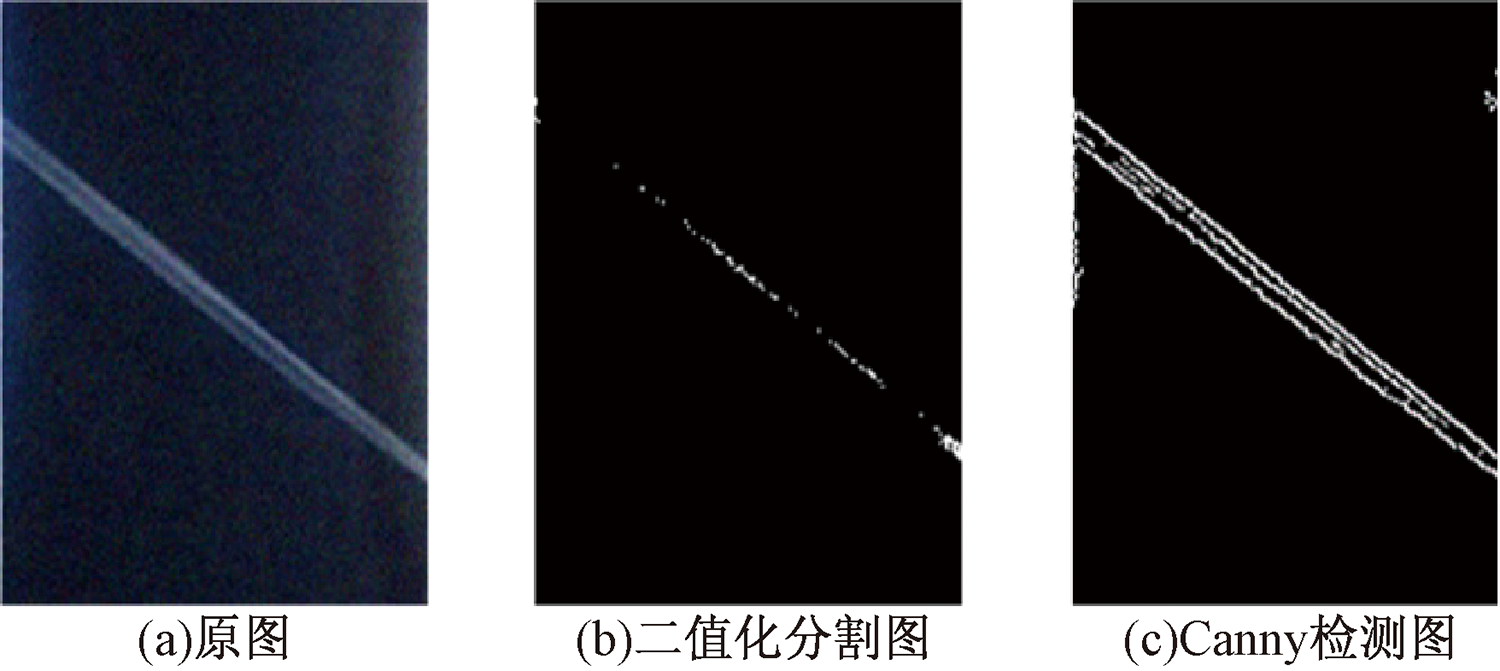
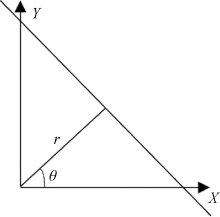
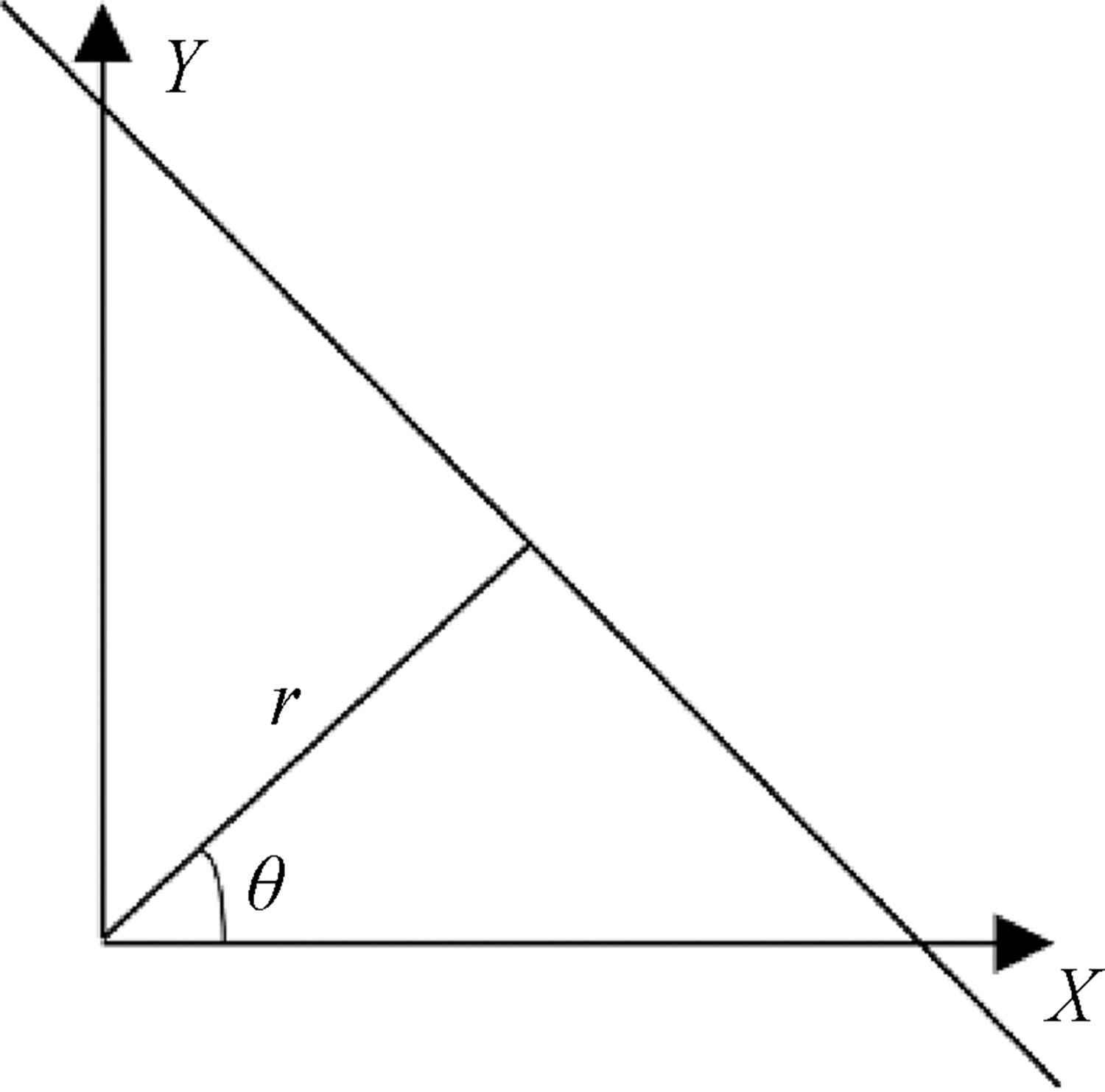
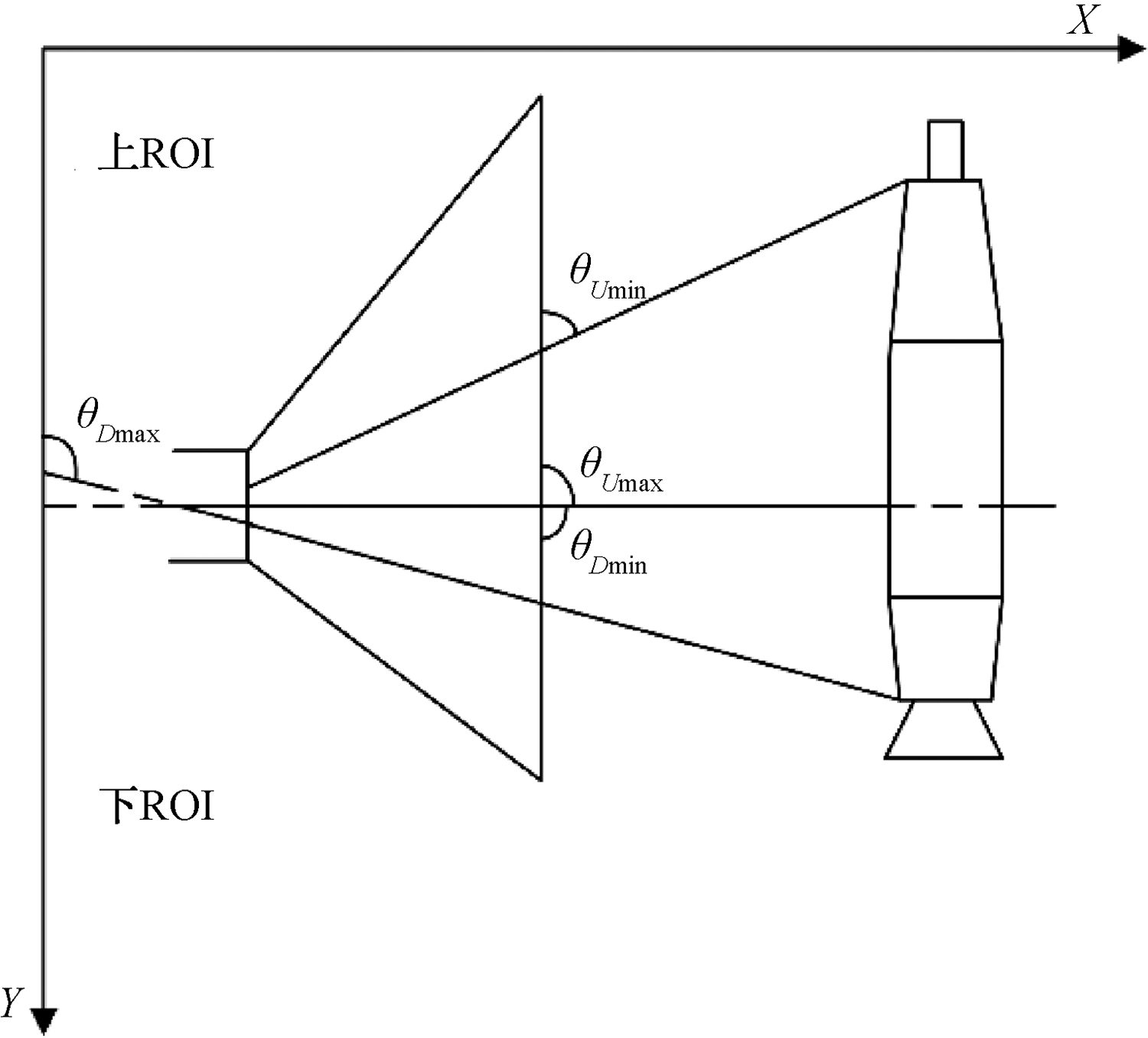
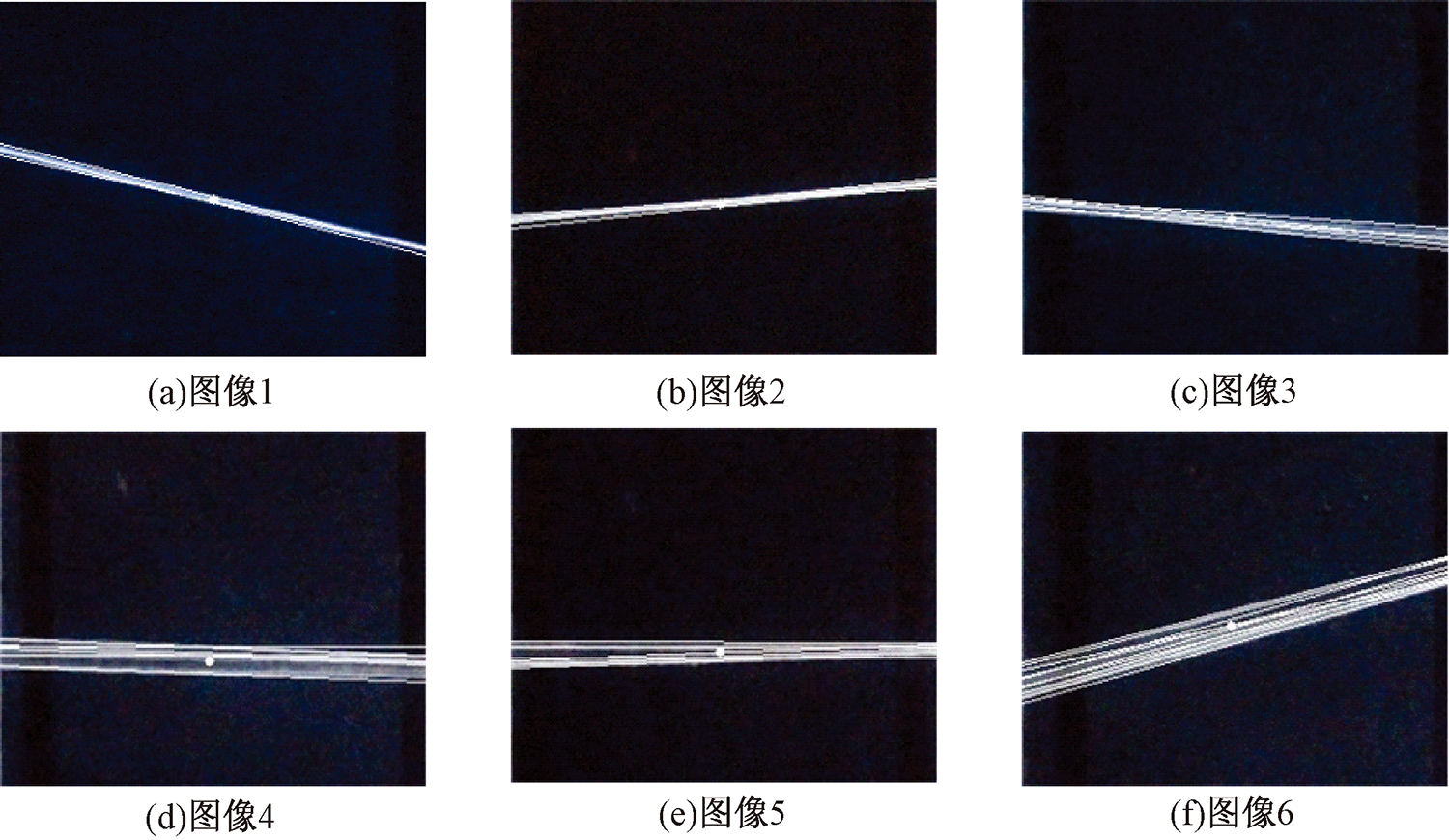
为实现通过机器视觉方式对细纱接头机器人的纱线断头进行定位,并简化机械结构,根据断头纱线图像特点,提出针对纱线特征的识别与定位算法。利用工业相机采集纱线被吸入吸嘴的图像,通过改进灰度增强方法增大纱线特征与背景对比度,利用Canny算子进行边缘检测,最后通过划分上下感兴趣区域以及优化的霍夫直线检测获取纱线的图像特征并利用定位算法提取所需的位置信息。结果表明:本文算法提取的位置信息精度较高,坐标点误差为1.42像素,角度误差为0.60°;相较于传统检测算法,程序运行时间得到了缩短,识别时间在10-1 s数量级上,实时性好;研究成果可应用于细纱接头机器人产品开发中。
中图分类号:
| [1] | 章友鹤, 赵连英. 环锭细纱机的技术进步与创新[J]. 纺织导报, 2015(1): 52-57. |
| ZHANG Youhe, ZHAO Lianying. Technological advancement and innovation of ring-spinning machine[J]. China Textile Leader, 2015(1): 52-57. | |
| [2] | 韩晨晨, 傅佳佳, 高卫东. 环锭细纱机的发展现状及技术进步[J]. 棉纺织技术, 2019, 47(2): 1-5. |
| HAN Chenchen, FU Jiajia, GAO Weidong. Development status and technology improvement of ring spinning frame[J]. Cotton Textile Technology, 2019, 47(2): 1-5. | |
| [3] | 唐新军, 宋均燕, 何小东. 国内外环锭纺自动接头装置的技术进展[J]. 棉纺织技术, 2019, 47(1): 78-84. |
| TANG Xinjun, SONG Junyan, HE Xiaodong. Technology progress of ring spinning automatic piecing device at home and abroad[J]. Cotton Textile Technology, 2019, 47(1): 78-84. | |
| [4] | 陈佳. 立达集团:自动化、紧密纺以及数字化领域创新突破[J]. 纺织导报, 2019 (7): 15. |
| CHEN Jia. Rieter group: innovative breakthroughs in automation, compact spinning and digitization[J]. China Textile Leader, 2019(7): 15. | |
| [5] | 唐火红, 周琼, 冯宝林, 等. 环锭纺接头机器人结构研究与动力学分析[J]. 机械设计与制造, 2016(1): 47-49,53. |
| TANG Huohong, ZHOU Qiong, FENG Baolin, et al. Structure research and dynamics analysis of yarn piecing robot for ring spinning[J]. Machinery Design & Manufacture, 2016(1): 47-49,53. | |
| [6] |
XIAO R, XU Y, HOU Z, et al. An adaptive feature extraction algorithm for multiple typical seam tracking based on vision sensor in robotic arc welding[J]. Sensors and Actuators A: Physical, 2019, 297:111533.
doi: 10.1016/j.sna.2019.111533 |
| [7] |
YANG H, CHEN L, MA Z, et al. Computer vision-based high-quality tea automatic plucking robot using Delta parallel manipulator[J]. Computers and Electronics in Agriculture, 2021, 181:105946.
doi: 10.1016/j.compag.2020.105946 |
| [8] | 张文昌, 单忠德, 卢影. 基于机器视觉的纱笼纱杆快速定位方法[J]. 纺织学报, 2020, 41(12): 137-143. |
| ZHANG Wenchang, SHAN Zhongde, LU Ying. Fast location of yarn-bars on yarn-cage based on machine vision[J]. Journal of Textile Research, 2020, 41(12): 137-143. | |
| [9] | 张建新, 李琦. 基于机器视觉的筒子纱密度在线检测系统[J]. 纺织学报, 2020, 41(6): 141-146. |
| ZHANG Jianxin, LI Qi. Online cheese package yarn density detection system based on machine vision[J]. Journal of Textile Research, 2020, 41(6): 141-146. | |
| [10] | 王雯雯, 刘基宏. 应用优化霍夫变换的细纱断头检测[J]. 纺织学报, 2018, 39(4): 36-41. |
| WANG Wenwen, LIU Jihong. Spinning breakage detection based on optimized Hough transform[J]. Journal of Textile Research, 2018, 39(4): 36-41. | |
| [11] | 孙博文, 朱志明, 郭吉昌, 等. 基于组合激光结构光的视觉传感器检测算法及图像处理流程优化[J]. 清华大学学报(自然科学版), 2019, 59(6): 445-452. |
| SUN Bowen, ZHU Zhiming, GUO Jichang, et al. Detection algorithms and optimization of image processing for visual sensors using combined laser structured light[J]. Journal of Tsinghua Univer-sity(Science and Technology), 2019, 59(6): 445-452. | |
| [12] | 王文帝, 辛斌杰, 邓娜, 等. 单一视角下自适应阈值法的纱线毛羽识别及其应用[J]. 纺织学报, 2019, 40(5): 150-156. |
| WANG Wendi, XIN Binjie, DENG Na, et al. Identification and application of yarn hairiness using adaptive threshold method under single vision[J]. Journal of Textile Research, 2019, 40(5): 150-156. | |
| [13] |
HAJJOUJI I, MARS S, ASRIH Z, et al. A novel FPGA implementation of Hough transform for straight lane detection[J]. Engineering Science and Technology, an International Journal, 2020, 23(2): 274-280.
doi: 10.1016/j.jestch.2019.05.008 |
| [1] | 张荣根, 冯培, 刘大双, 张俊平, 杨崇倡. 涤纶工业长丝毛丝在线检测系统的研究[J]. 纺织学报, 2022, 43(04): 153-159. |
| [2] | 熊晶晶, 杨雪, 苏静, 王鸿博. 基于图像技术的织物导湿性能测试方法[J]. 纺织学报, 2021, 42(12): 70-75. |
| [3] | 吕文涛, 林琪琪, 钟佳莹, 王成群, 徐伟强. 面向织物疵点检测的图像处理技术研究进展[J]. 纺织学报, 2021, 42(11): 197-206. |
| [4] | 夏旭文, 孟朔, 潘如如, 高卫东. 基于改进帧间差分法的经纱撞筘拥纱在线检测[J]. 纺织学报, 2021, 42(06): 91-96. |
| [5] | 江燕婷, 严庆帅, 辛斌杰, 高琮, 施楣梧. 纺织品单向导水性能测试方法分析[J]. 纺织学报, 2021, 42(05): 51-58. |
| [6] | 吴柳波, 李新荣, 杜金丽. 基于轮廓提取的缝纫机器人运动轨迹规划研究进展[J]. 纺织学报, 2021, 42(04): 191-200. |
| [7] | 李东洁, 郭帅, 杨柳. 基于改进图像阈值分割算法的纱线疵点检测[J]. 纺织学报, 2021, 42(03): 82-88. |
| [8] | 唐千惠, 王蕾, 高卫东. 基于图像处理的织物保形性检测[J]. 纺织学报, 2021, 42(03): 89-94. |
| [9] | 田宇航, 王绍宗, 张文昌, 张倩. 基于机器视觉的单组分染液浓度快速检测方法[J]. 纺织学报, 2021, 42(03): 115-121. |
| [10] | 冯文倩, 李新荣, 杨帅. 人体轮廓机器视觉检测算法的研究进展[J]. 纺织学报, 2021, 42(03): 190-196. |
| [11] | 孟朔, 夏旭文, 潘如如, 周建, 王蕾, 高卫东. 基于卷积神经网络的机织物密度均匀性检测[J]. 纺织学报, 2021, 42(02): 101-106. |
| [12] | 朱世根, 杨宏贤, 白云峰, 丁浩, 朱巧莲. 长条状细薄带钩零件变形自动检测系统[J]. 纺织学报, 2020, 41(10): 158-163. |
| [13] | 张建新, 李琦. 基于机器视觉的筒子纱密度在线检测系统[J]. 纺织学报, 2020, 41(06): 141-146. |
| [14] | 路浩, 陈原. 基于机器视觉的碳纤维预浸料表面缺陷检测方法[J]. 纺织学报, 2020, 41(04): 51-57. |
| [15] | 王文胜, 李天剑, 冉宇辰, 卢影, 黄民. 筒子纱纱笼纱杆的定位检测方法[J]. 纺织学报, 2020, 41(03): 160-167. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号