纺织学报 ›› 2023, Vol. 44 ›› Issue (07): 207-213.doi: 10.13475/j.fzxb.20220502201
李皎1,2, 陈利1,2, 姚天磊1,2, 陈小明1,2,3( )
)
LI Jiao1,2, CHEN Li1,2, YAO Tianlei1,2, CHEN Xiaoming1,2,3()
摘要:
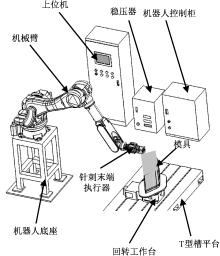
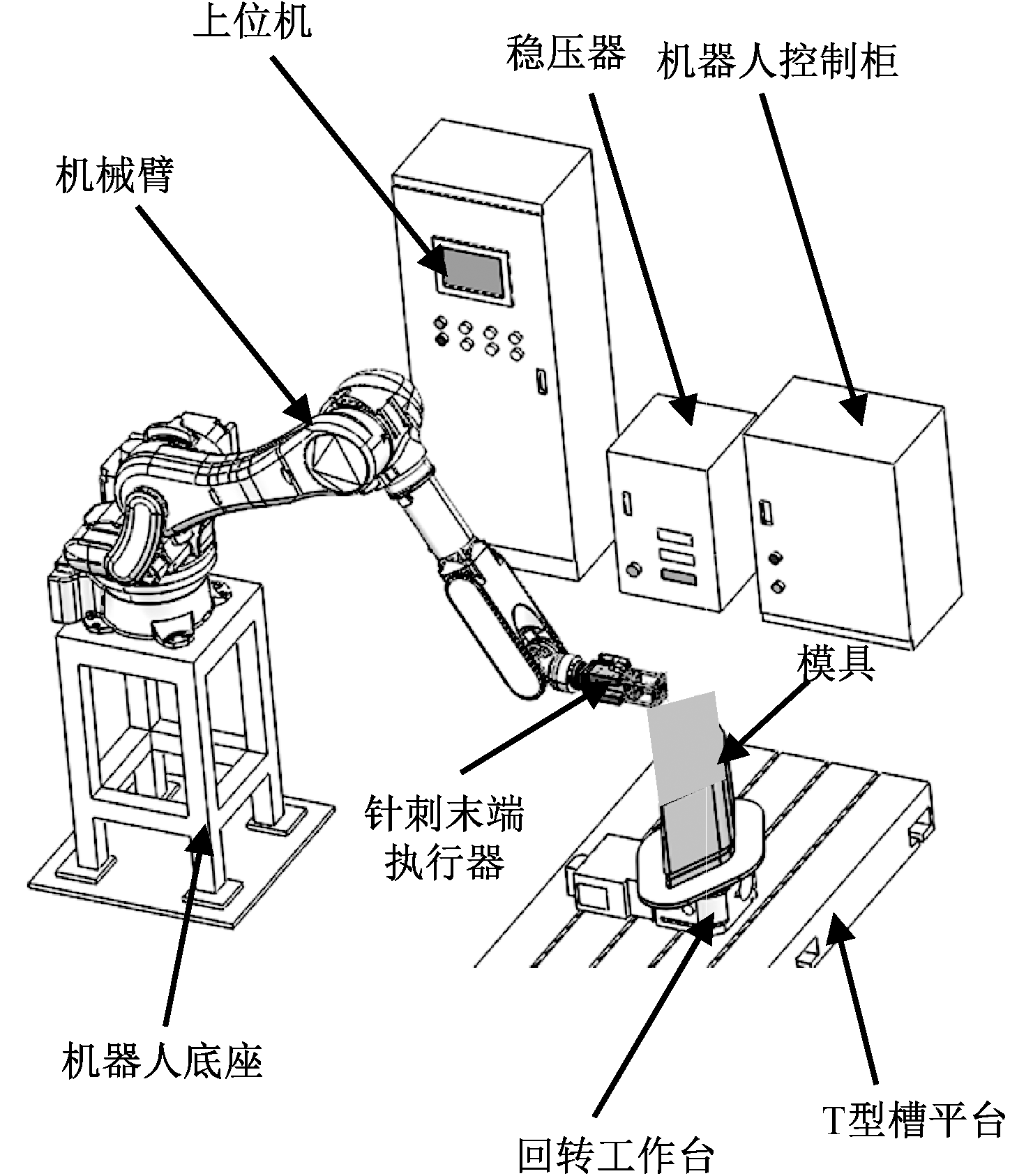
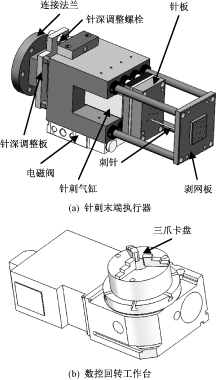
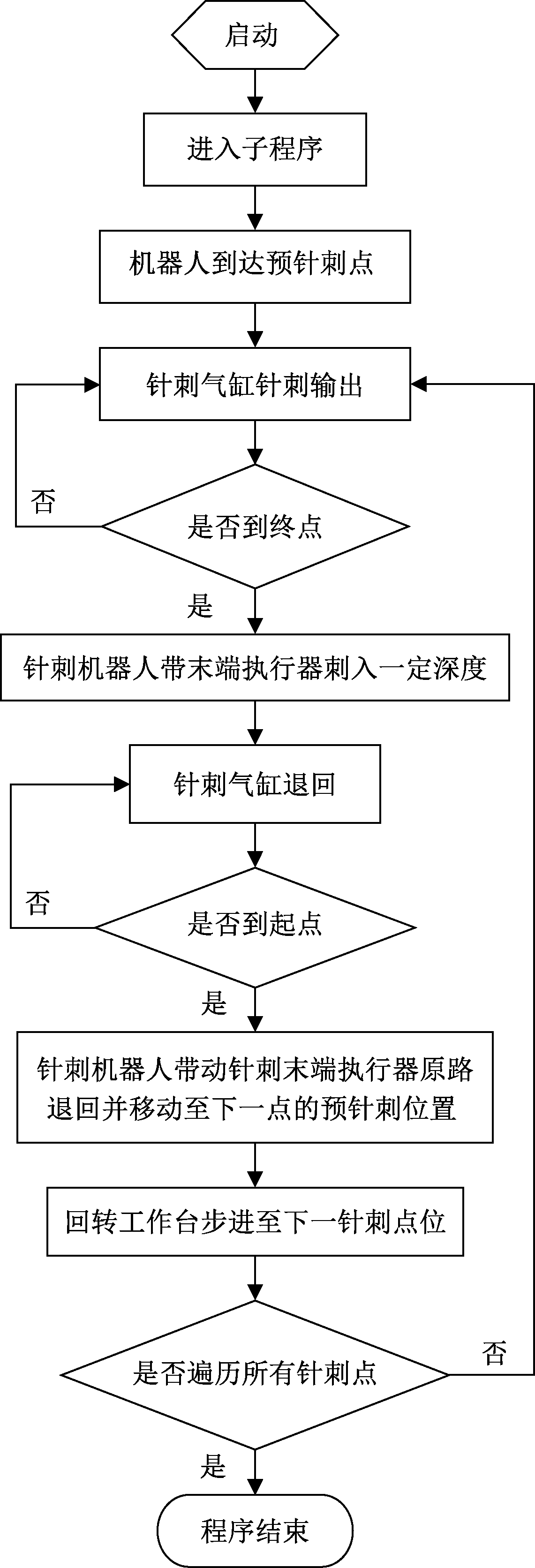
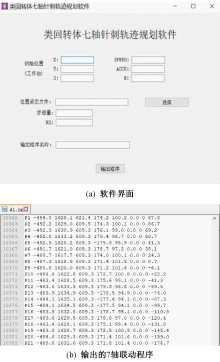
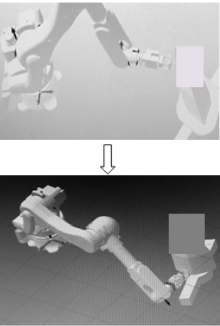
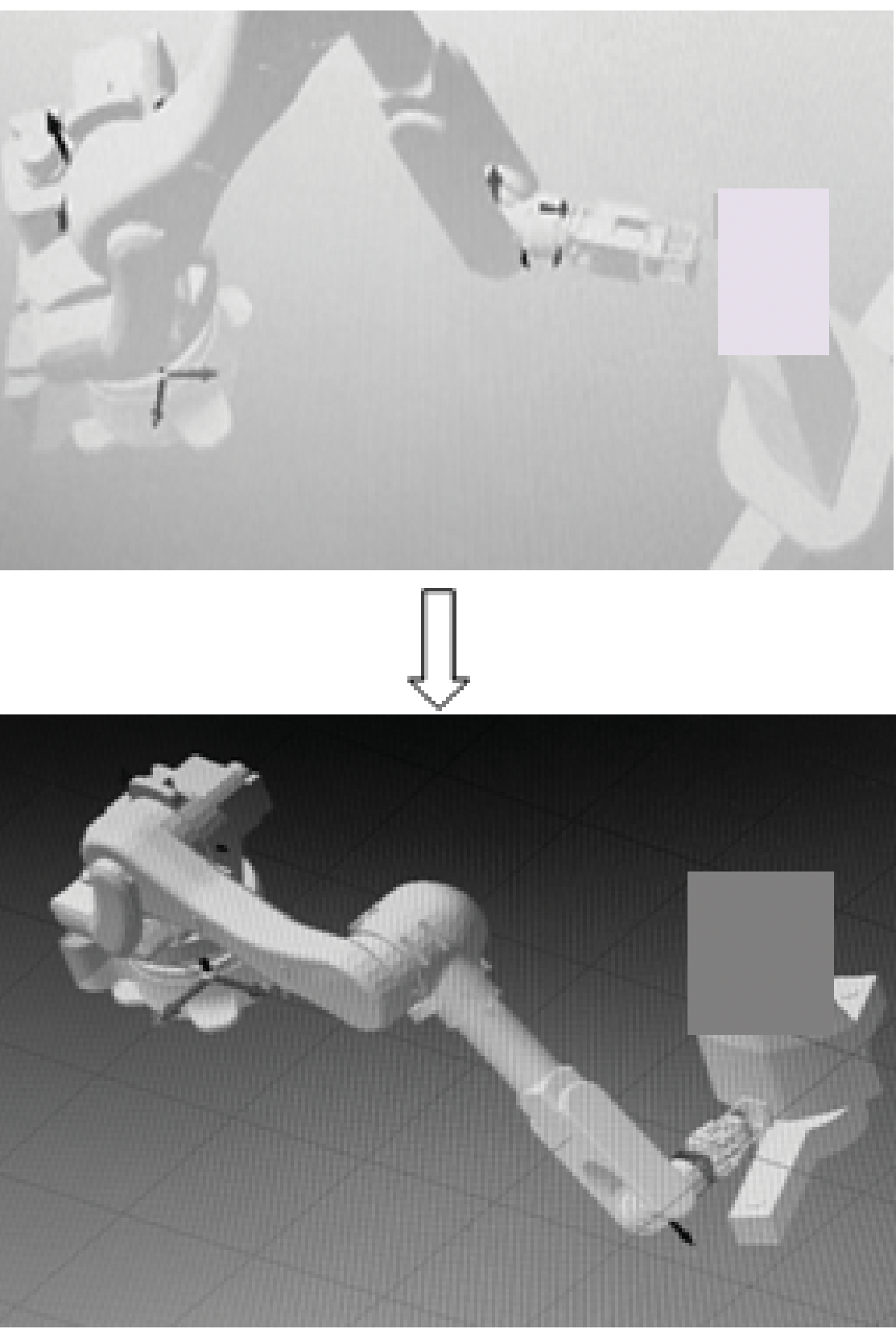
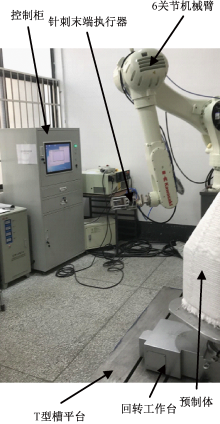
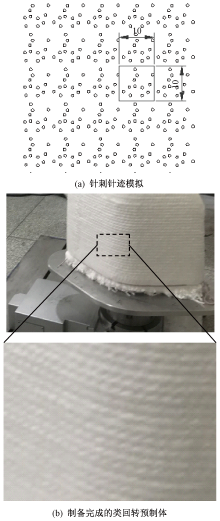
类回转复合材料预制体外形结构复杂,目前的4轴针刺系统和6关节机器人针刺成型系统难以满足其成型织造要求,提出一种基于机器人平台的7轴联动针刺成型系统,用于类回转预制体的针刺成型。开展了7轴针刺成型系统的机械结构设计、控制系统设计,以及针刺轨迹规划方法研究,并通过运动仿真和实验验证系统的可行性。结果表明:针刺实验轨迹和理论设计轨迹高度一致,针迹均匀,预制体表面平整,7轴联动针刺成型系统成功实现了类回转预制体的高质量针刺成型;采用Powershape和Powermill软件成功实现了连续轨迹线设计和针刺机器人6轴程序输出;自主开发的6轴程序转换成7轴程序的算法是可靠的,基于Python和QT Designer开发的7轴针刺机器人程序后处理软件成功实现了7轴针刺机器人可执行程序的高精确输出。本文系统可用于高速飞行器天线罩、舱段等复合材料预制体的高质量针刺成型。
中图分类号:
| [1] | 陈小明, 李晨阳, 李皎, 等. 三维针刺技术研究进展[J]. 纺织学报, 2021, 42(5):185-192. |
| CHEN Xiaoming, LI Chenyang, LI Jiao, et al. Research progress of three-dimensional needling technology[J]. Journal of Textile Research, 2021, 42(5):185-192. | |
| [2] |
CHEN X, CHEN L, ZHANG C, et al. Three-dimensional needle-punching for composites: a review[J]. Composites Part A: Applied Science and Manufacturing, 2016, 85: 12-30.
doi: 10.1016/j.compositesa.2016.03.004 |
| [3] |
JI A, CUI H, LI H, et al. Performance analysis of a carbon cloth/felt layer needled preform[J]. New Carbon Materials, 2011, 26(2): 109-116.
doi: 10.1016/S1872-5805(11)60070-X |
| [4] |
LACOSTE M, LACOMBE A, JOYEZ P, et al. Carbon/carbon extendible nozzles[J]. Acta Astronautica, 2002, 50(6): 357-367.
doi: 10.1016/S0094-5765(01)00178-3 |
| [5] | SU J, CUI H, LI R, et al. The structure and property of new needle carbon cloth C/C composite[J]. New Carbon Materials, 2000, 15(2): 11-15. |
| [6] |
CHEN T, LIAO J, LIU G, et al. Effects of needle-punched felt structure on the mechanical properties of carbon/carbon composites[J]. Carbon, 2003, 41(5): 993-999.
doi: 10.1016/S0008-6223(02)00445-1 |
| [7] |
刘宇峰, 俸翔, 王金明, 等. 高性能针刺碳/碳复合材料的制备与性能[J]. 无机材料学报, 2020, 35(10):1105-1111.
doi: 10.15541/jim20190607 |
|
LIU Yufeng, FENG Xiang, WANG Jinming, et al. Preparation and properties of high-performance needled carbon/carbon composites[J]. Journal of Inorganic Materials, 2020, 35(10):1105-1111.
doi: 10.15541/jim20190607 |
|
| [8] | 董九志, 腊鑫, 陈云军, 等. 针刺炭/炭坩埚预制体叠层炭布裁剪尺寸建模[J]. 天津工业大学学报, 2020, 39(1):57-62. |
| DONG Jiuzhi, LA Xin, CHEN Yunjun, et al. Modeling of cutting size of laminated carbon cloth for needled carbon/carbon crucible preform[J]. Journal of Tiangong University, 2020, 39(1):57-62. | |
| [9] | OLRY P. Process and apparatus for manufacturing axi-symmetrical three-dimensional structures: US4621662A[P]. 1986-11-11. |
| [10] | 房坤鹏, 刘延友, 乔志炜, 等. 一种变直径回转体织物针刺成型设备:201710200976.7[P]. 2017-03-30. |
| FANG Kunpeng, LIU Yanyou, QIAO Zhiwei, et al. Variable diameter rotary fabric needle forming device: 201710200976.7[P]. 2017-03-30. | |
| [11] | 陈小明, 李皎, 张一帆, 等. 回转结构预制体柔性针刺成型系统设计[J]. 纺织学报, 2020, 41(11): 156-161. |
| CHEN Xiaoming, LI Jiao, ZHANG Yifan, et al. Design of flexible needle punching system for rotary structure preform[J]. Journal of Textile research, 2020, 41(11):156-161. | |
| [12] |
CHEN X, ZHAO Y, ZHANG C, et al. Robot needle-punching for manufacturing composite preforms[J]. Robotics and Computer-Integrated Manufacturing, 2018, 50: 132-139.
doi: 10.1016/j.rcim.2017.09.008 |
| [13] |
CHEN X, ZHANG Y, XIE J, et al. Robot needle-punching path planning for complex surface preforms[J]. Robotics and Computer-Integrated Manufacturing, 2018, 52: 24-34.
doi: 10.1016/j.rcim.2018.02.004 |
| [1] | 吕钧炜, 罗龙波, 刘向阳. 基于直接氟化技术的芳纶表/界面结构设计与制备研究进展[J]. 纺织学报, 2023, 44(06): 21-27. |
| [2] | 周赳, 胡伊丽. 等经浮长的三纬组合全显结构设计与应用[J]. 纺织学报, 2023, 44(06): 78-84. |
| [3] | 陈弈菲, 刘驰, 杨萌. 基于响应曲面分析的连体泳装结构情绪测量[J]. 纺织学报, 2022, 43(10): 161-168. |
| [4] | 徐铭涛, 嵇宇, 仲越, 张岩, 王萍, 眭建华, 李媛媛. 碳纤维/环氧树脂基复合材料增韧改性研究进展[J]. 纺织学报, 2022, 43(09): 203-210. |
| [5] | 鲁虹, 宋佳怡, 李圆圆, 滕峻峰. 基于合体两片袖的内旋造型结构设计[J]. 纺织学报, 2022, 43(08): 140-146. |
| [6] | 董智佳, 孙菲, 丛洪莲, 俞旭良. 低损耗纬编成形女士背心的结构设计与建模[J]. 纺织学报, 2022, 43(07): 129-134. |
| [7] | 雷鸽, 李小辉. 数字化服装结构设计技术的研究进展[J]. 纺织学报, 2022, 43(04): 203-209. |
| [8] | 陆爽怿, 周赳. 单经双纬组合全显色提花织物的结构交织平衡特征[J]. 纺织学报, 2021, 42(09): 59-65. |
| [9] | 柯莹, 张海棠, 朱晓涵, 王宏付, 王敏. 电加热高空清洁作业服研制与性能评价[J]. 纺织学报, 2021, 42(08): 149-155. |
| [10] | 王伟荣, 丛洪莲. 基于下肢运动特征的纬编无缝瑜伽裤结构设计[J]. 纺织学报, 2021, 42(06): 140-145. |
| [11] | 苏梦茹, 邹婷, 陈颀超, 李超婧, 王富军, 王璐. 医用倒刺缝合线的研究进展[J]. 纺织学报, 2021, 42(05): 178-184. |
| [12] | 陈小明, 李晨阳, 李皎, 谢军波, 张一帆, 陈利. 三维针刺技术研究进展[J]. 纺织学报, 2021, 42(05): 185-192. |
| [13] | 宋莹. 旗袍个性定制和展示系统的交互设计[J]. 纺织学报, 2021, 42(04): 144-148. |
| [14] | 方佳璐, 陈明艳, 黄紫荆. 漂浮自救泳衣设计开发[J]. 纺织学报, 2020, 41(12): 118-123. |
| [15] | 陈小明, 李皎, 张一帆, 谢军波, 李晨阳, 陈利. 回转结构预制体柔性针刺成型系统设计[J]. 纺织学报, 2020, 41(11): 156-161. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号