纺织学报 ›› 2025, Vol. 46 ›› Issue (06): 223-230.doi: 10.13475/j.fzxb.20240703201
王晗, 张琦( ), 刘董, 宋金龙, 席立锋, 郝佳姝, 彭诗语, 李坤磊, 张超
), 刘董, 宋金龙, 席立锋, 郝佳姝, 彭诗语, 李坤磊, 张超
WANG Han, ZHANG Qi(), LIU Dong, SONG Jinlong, XI Lifeng, HAO Jiashu, PENG Shiyu, LI Kunlei, ZHANG Chao
摘要:
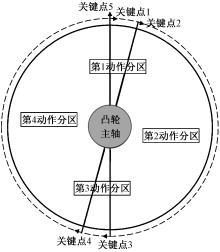
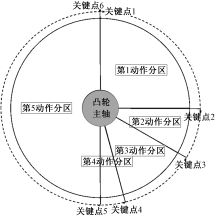
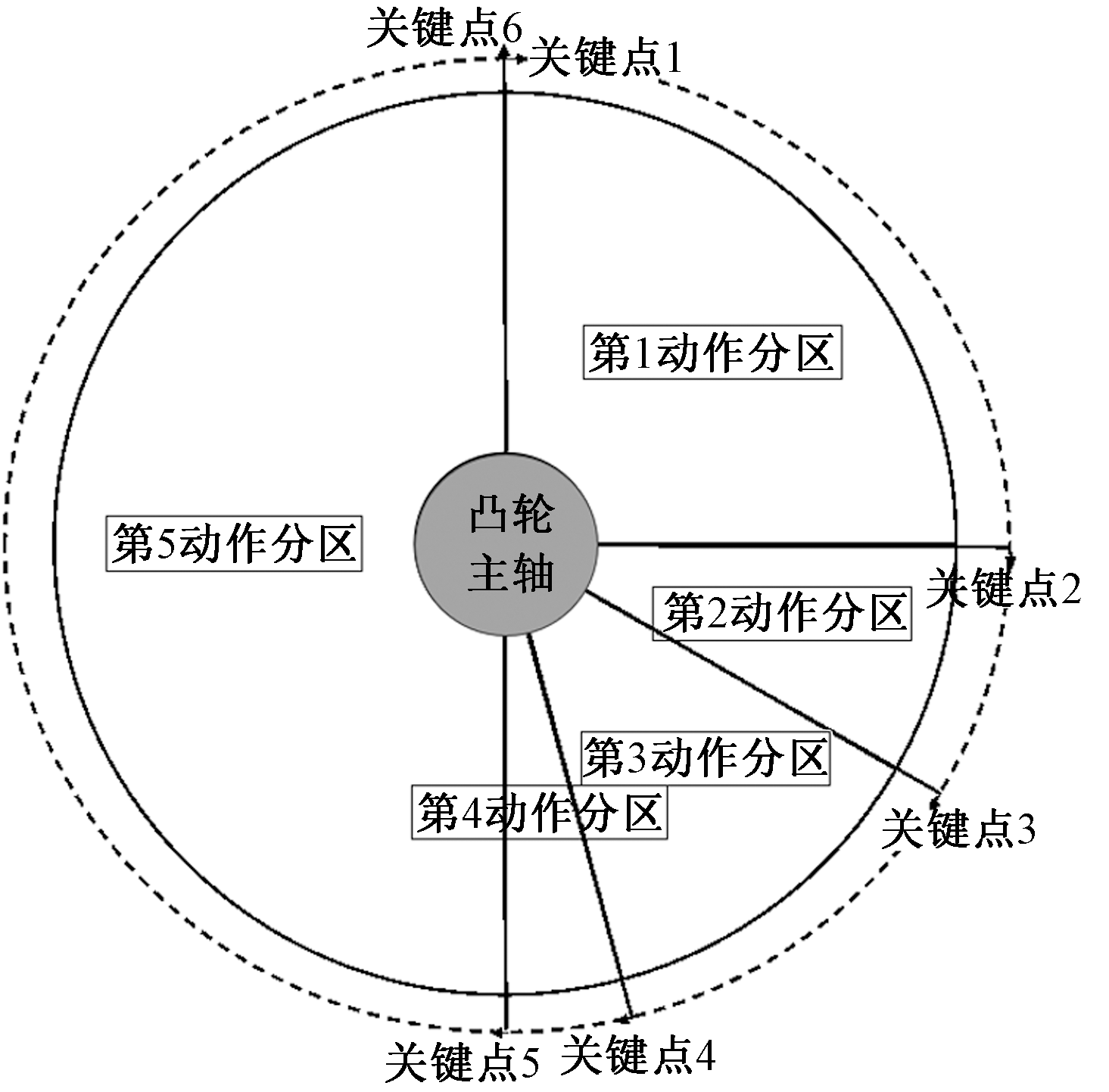
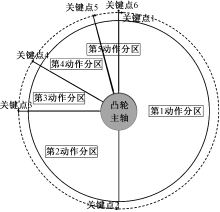
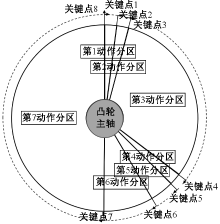
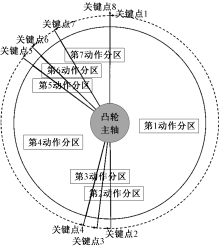
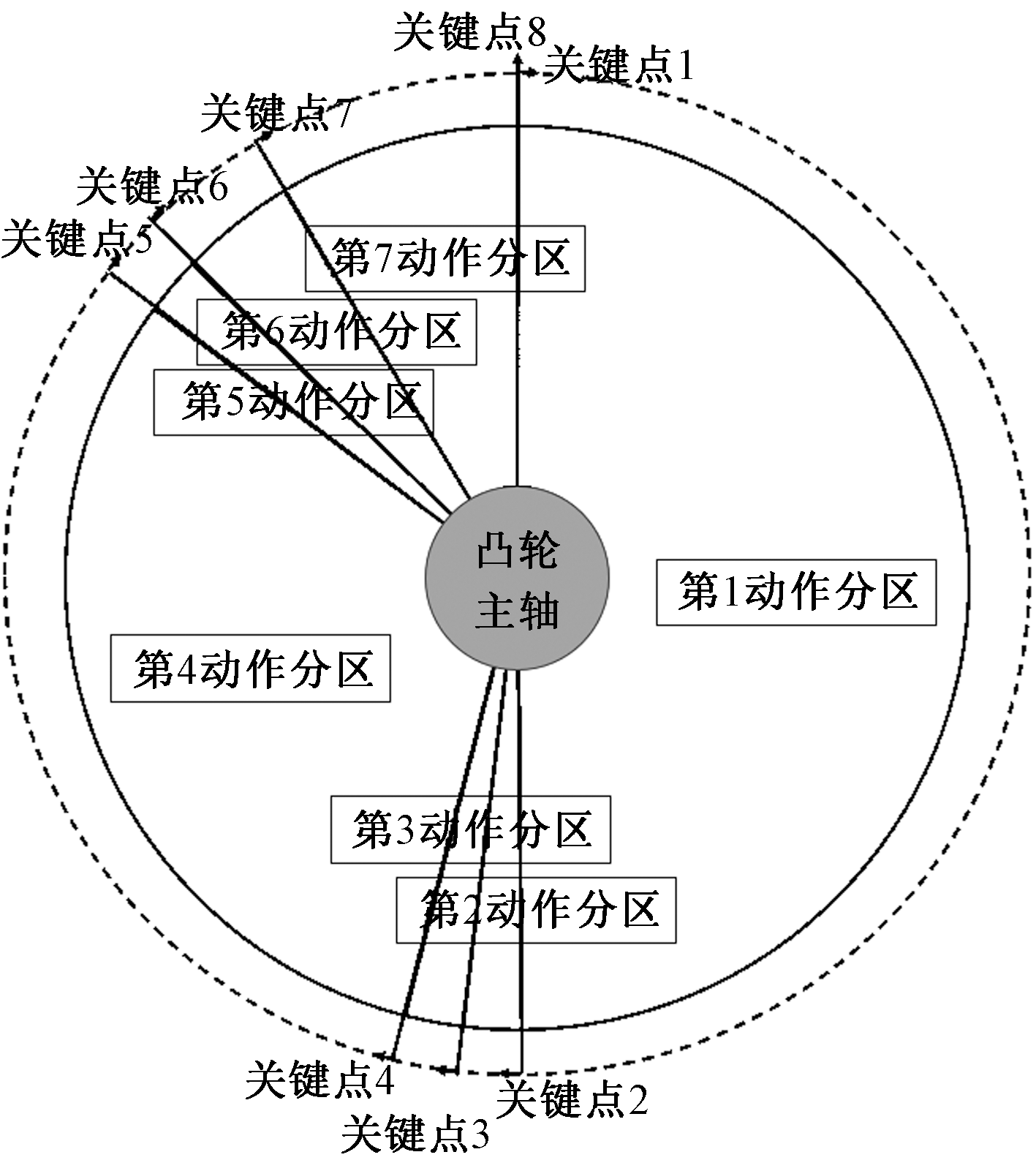
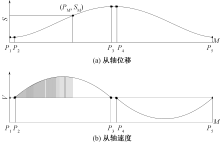
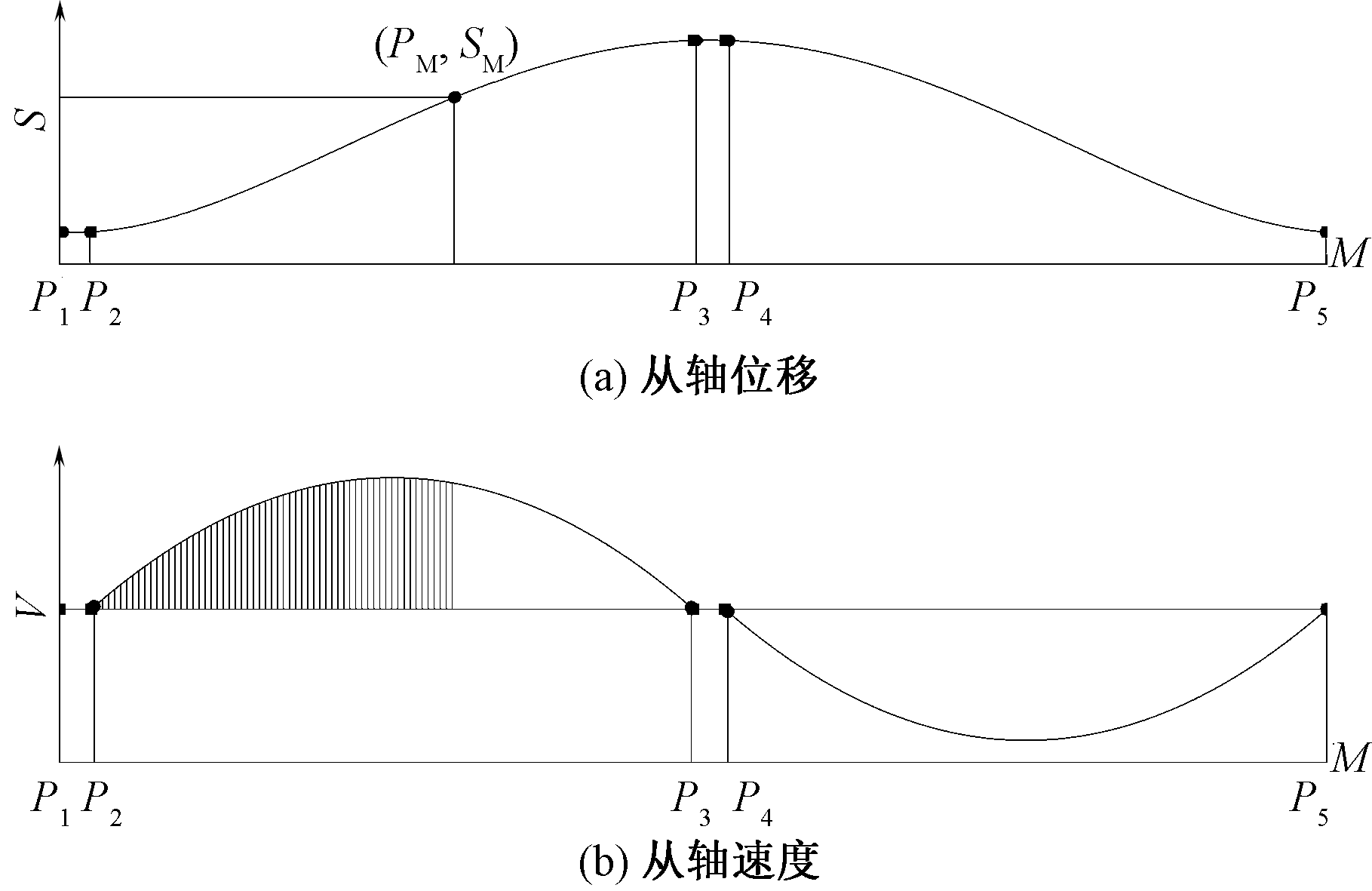
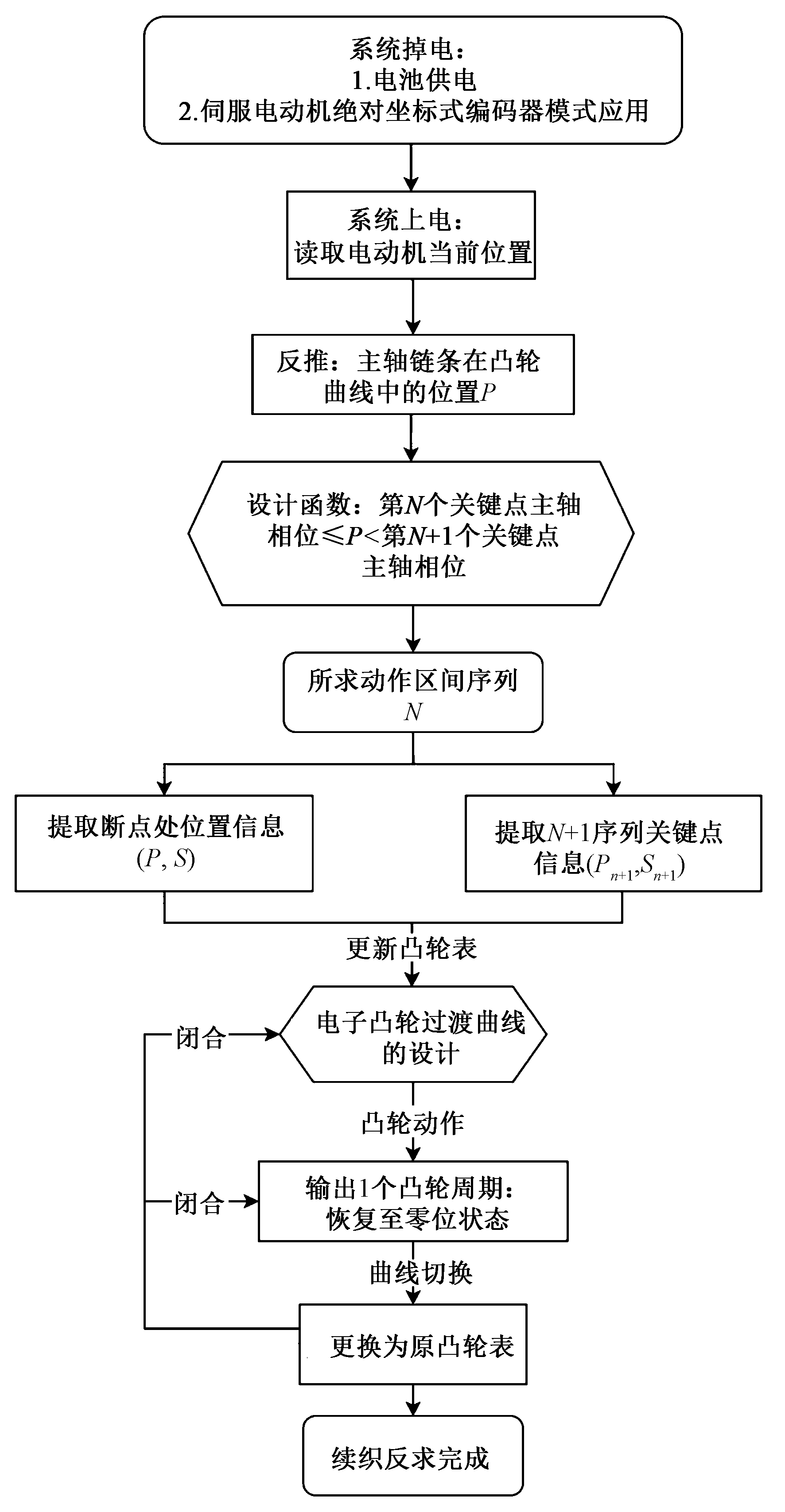
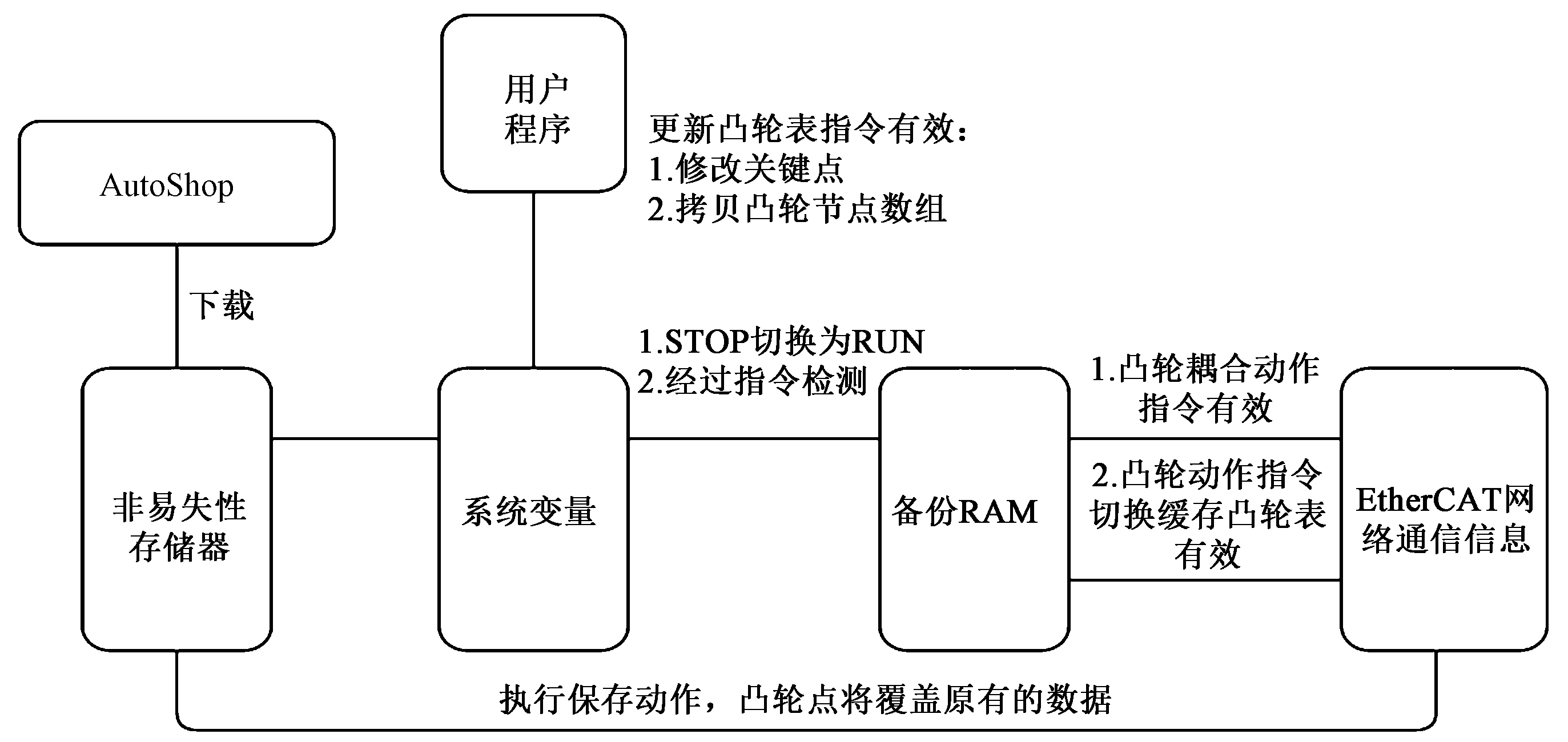
为解决全幅衬纬经编机在运行过程中因系统意外失电,尤其在制备体外膜肺氧合(ECMO)设备用氧合膜材料时,断电重启处置不当形成疵病进而产生较大原材料损失的问题,通过使用伺服电动机绝对坐标系模式和从轴电子凸轮曲线对凸轮跟随断点处的物理位置信息进行反求;然后利用该位置信息定位出铺纬机构各配合从轴的断点所处的运动时序分区,再借助电子凸轮关键点位数据设计出各自凸轮的过渡曲线;最后利用凸轮表数据流进行过渡曲线与原电子凸轮曲线的耦合与切换,实现准确的断点续织。经KSM2/1EL型全幅衬纬经编机完成系统断电重启后的断点续织测试后发现,采取的衬纬系统断点续织控制技术可成功解决织机在任意位置的掉电续织问题。
中图分类号:
| [1] | 魏光群. 多轴向经编机铺纬运动的研究[D]. 无锡: 江南大学, 2009: 8-22. |
| WEI Guangqun. Research on weft laying motion of multiaxial warp knitting machine[D]. Wuxi: Jiangnan University, 2009: 8-22. | |
| [2] | 席立锋, 蒋高明, 马丕波. 体外膜肺氧合经编膜织物自适应张力的低损伤制备[J]. 纺织学报, 2024, 45(7): 1-9. |
| XI Lifeng, JIANG Gaoming, MA Pibo. Preparation of low injury of adaptive tension of extracorporeal membrane oxygenated warp braided membrane fabrics[J]. Journal of Textile Research, 2024, 45(7): 1-9. | |
| [3] | 周进. 多轴向经编机成圈缝缀装置的研究[D]. 常州: 江苏理工学院, 2015: 13-18. |
| ZHOU Jin. Research on loop sewing device of multiaxial warp knitting machine[D]. Changzhou: Jiangsu University of Technology, 2015:13-18. | |
| [4] |
张琦, 罗成, 曲超群, 等. 现代经编电子提花断点续织关键控制技术[J]. 纺织学报, 2019, 40(10):164-170.
doi: 10.13475/j.fzxb.20180906107 |
|
ZHANG Qi, LUO Cheng, QU Chaoqun, et al. Key control technologies for modern electronic jacquard breakpoint continuation in warp knitting[J]. Journal of Textile Research, 2019, 40 (10): 164-170.
doi: 10.13475/j.fzxb.20180906107 |
|
| [5] | 何小伟, 陈亚飞. 多轴向经编机工作原理及铺纬分析[J]. 化工管理, 2018(36):87-88. |
| HE Xiaowei, CHEN Yafei. Working principle and weft laying analysis of multi axis warp knitting machine[J]. Chemical Management, 2018 (36): 87-88. | |
| [6] | 邱巧迪, 徐世许, 王伟. 基于电子凸轮追剪的排序机控制系统设计[J]. 控制工程, 2022, 29(11):2138-2144. |
| QIU Qiaodi, XU Shixu, WANG Wei. Design of sequencing machine control system based on electronic cam shear[J]. Control Engineering, 2022, 29(11):2138-2144. | |
| [7] | 赵映川. 编码器原理与应用分析[J]. 无线互联科技, 2018, 15(22):67-69,78. |
| ZHAO Yingchuan. Analysis on the principle and application of encoder device[J]. Wireless Internet Technology, 2018, 15(22):67-69,78. | |
| [8] | 陈历波. 基于电子凸轮和软 PLC 技术的数控制刷机床运动控制系统设计与开发[D]. 杭州: 浙江大学,2020:19-46. |
| CHEN Libo. Design and development of motion control system for numerical control brush machine tool based on electronic cam and soft PLC technology[D]. Hangzhou: Zhejiang University, 2020:19-46. | |
| [9] | 姜自燃, 徐世许, 张浩琳. 基于电子凸轮飞剪的枕式包装机控制系统设计[J]. 包装工程, 2023, 44(13):197-207. |
| JIANG Ziran, XU Shixu, ZHANG Haolin. Design of pillow packaging machine control system based on electronic cam flying shear[J]. Packaging Engineering, 2023, 44(13):197-207. | |
| [10] | 江南大学.一种经编机用电子横移提花断电续编控制方法:201810718631.5[P]. 2019-10-25. |
| Jiangnan University. Electronic traversing jacquard power-off continuation control method for warp knitting machine:201810718631.5[P]. 2019-10-25. |
| [1] | 卢海龙, 于影, 左雨欣, 王浩然, 陈洪立, 汝欣. 取向增强抗CO2腐蚀纤维薄膜的制备及其性能[J]. 纺织学报, 2024, 45(12): 33-40. |
| [2] | 李成才, 朱登辉, 朱海霖, 郭玉海. 聚四氟乙烯膜的超疏水改性及应用研究进展[J]. 纺织学报, 2024, 45(08): 65-71. |
| [3] | 席立锋, 马丕波, 贾伟, 王佳冕, 张红斌, 彭小权, 夏风林, 蒋高明. 国内体外膜肺氧合技术研究进展[J]. 纺织学报, 2024, 45(08): 234-240. |
| [4] | 席立锋, 蒋高明, 马丕波, 贾伟, 张红斌, 王佳冕, 夏风林, 张琦, 刘海桑. 体外膜肺氧合经编膜织物自适应张力的低损伤制备[J]. 纺织学报, 2024, 45(07): 1-9. |
| [5] | 贾姣, 郑作保, 吴昊, 徐乐, 刘熙, 董凤春, 贾永堂. 静电纺聚合物复合金属有机框架功能纳米纤维膜的研究进展[J]. 纺织学报, 2023, 44(06): 215-224. |
| [6] | 郑宝平, 蒋高明, 夏风林, 张爱军. 基于模型预测的经编送经动态张力补偿系统设计[J]. 纺织学报, 2021, 42(09): 163-169. |
| [7] | 汪泽幸, 李帅, 谭冬宜, 孟硕, 何斌. 循环加载处理对聚氯乙烯涂层膜材料蠕变性能的影响[J]. 纺织学报, 2021, 42(07): 101-107. |
| [8] | 沈瑞超, 郗欣甫, 孙以泽. 三维增材鞋面印花机对位平台的冗余驱动控制策略[J]. 纺织学报, 2020, 41(10): 164-169. |
| [9] | 汪泽幸, 朱文佳, 何斌, 刘超. 单轴多级循环加载下聚氯乙烯膜材料的力学行为与能量耗散[J]. 纺织学报, 2019, 40(06): 20-26. |
| [10] | 汪泽幸 刘超 何斌 周锦涛 李洪登. 聚氯乙烯涂层膜材料非线性蠕变性能预测[J]. 纺织学报, 2018, 39(10): 68-73. |
| [11] | 罗平艳 蒋金华 陈南梁 胡淳 崔鹏. 新型氟乙烯乙烯基醚树脂增强膜材料的制备及其力学性能[J]. 纺织学报, 2018, 39(07): 50-54. |
| [12] | 牛善宇 曹清林. 采用电子凸轮的多梳栉经编机成圈运动[J]. 纺织学报, 2017, 38(04): 127-133. |
| [13] | 曹静 徐伯俊 谢春萍 刘新金 苏旭中. 细纱机电子凸轮的设计[J]. 纺织学报, 2013, 34(12): 117-0. |
| [14] | 郑宝平 蒋高明 夏风林 张琦. 基于转矩控制模式的经编电子横移系统设计[J]. 纺织学报, 2012, 33(10): 122-127. |
| [15] | 邱文灿;杨旭东;丁辛;胡淳. PVC膜材料的光氧老化性能[J]. 纺织学报, 2010, 31(12): 33-38. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号