纺织学报 ›› 2025, Vol. 46 ›› Issue (03): 207-215.doi: 10.13475/j.fzxb.20240405301
李皎1,2, 辛世纪2,3, 陈利1,2, 易伟4, 陈小明1,2,3( )
)
LI Jiao1,2, XIN Shiji2,3, CHEN Li1,2, YI Wei4, CHEN Xiaoming1,2,3()
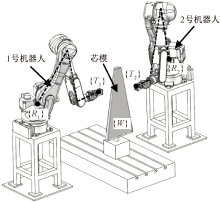
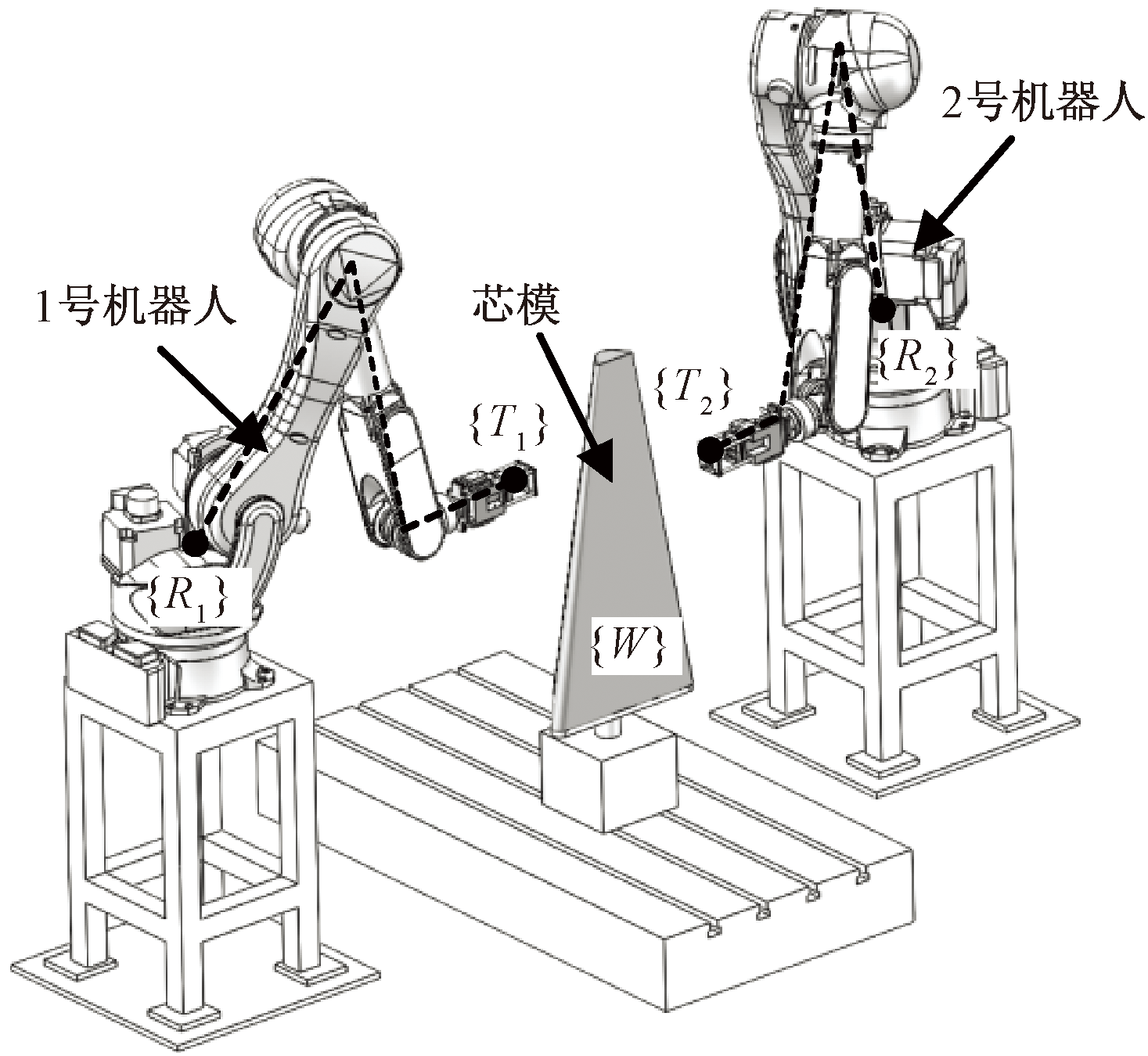
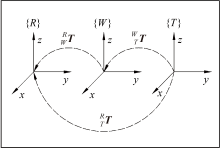
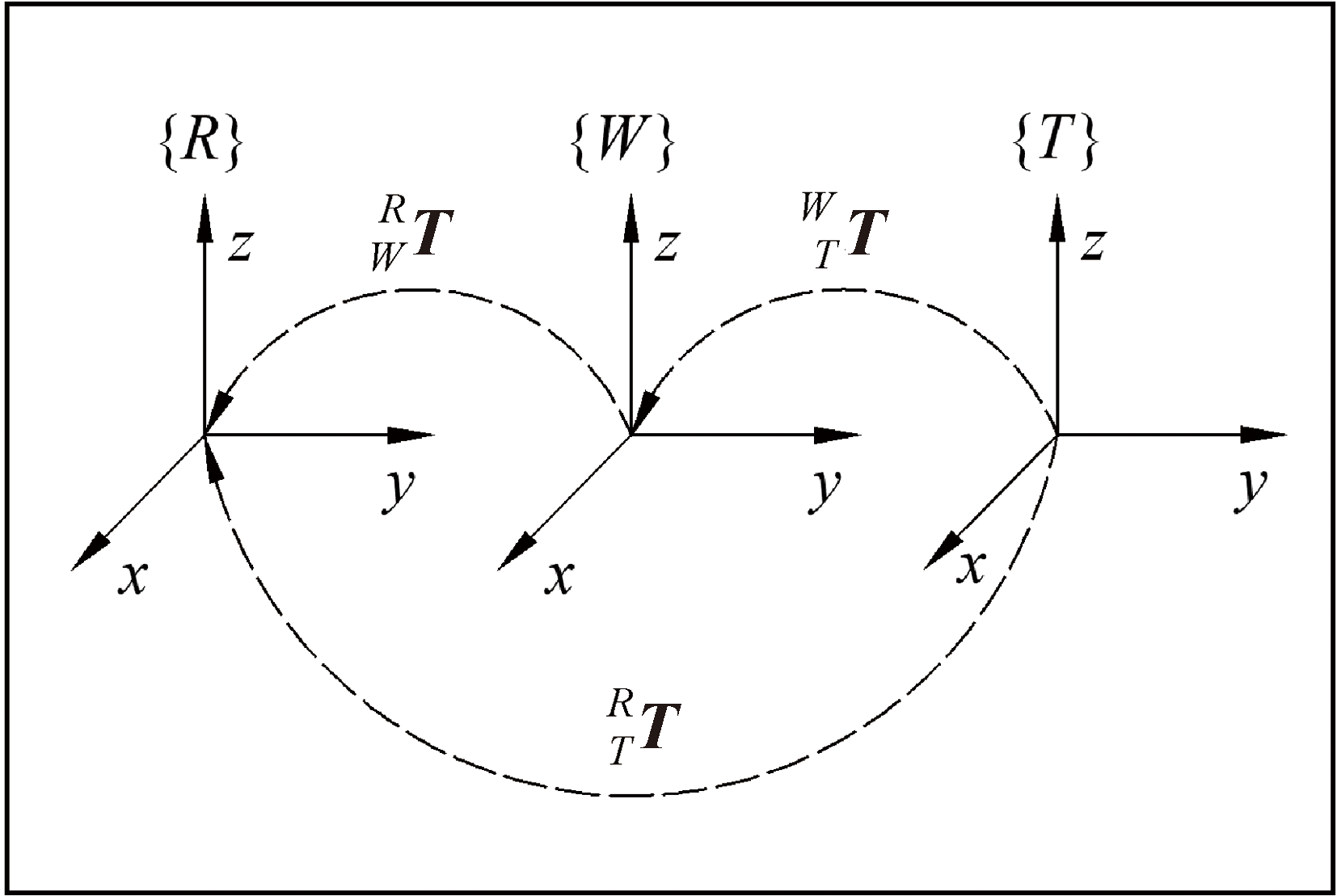
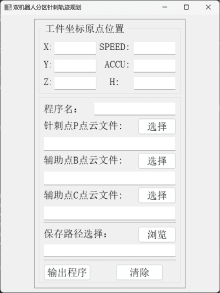
摘要: 为提高类回转曲面预制体的针刺成型质量和生产效率,提出一种双机器人分区针刺成形轨迹规划技术。利用类回转体的对称面,将针刺区域等分,实现双机器人针刺任务的均衡分配及其动作的独立控制,再使用三维CAD软件处理曲面数模获得针刺路径,然后通过由针刺点和辅助点构造的4个共顶点的三角网格单元,计算针刺点空间姿态。结果表明:构建的双机器人分区针刺轨迹规划理论与方法可行,开发的CAM后置处理软件可在2 s内实现机器人可执行程序的高效、高精确输出。双机器人分区针刺离线仿真过程无碰撞,末端执行器的位姿精准,类回转预制体针刺成形的针迹与计算机模拟轨迹的结果高度一致。双机器人高效完成了类回转预制体的针刺成形,生产效率比单台机器人提高了1倍,总针刺频率达到110次/min,适用于类回转预制体的批量化高效生产织造。
中图分类号:
| [1] | CHEN X, CHEN L, ZHANG C, et al. Three-dimensional needle-punching for composites: a review[J]. Composites Part A: Applied Science and Manufacturing, 2016, 85: 12-30. |
| [2] |
单忠德, 周征西, 孙正, 等. 航空航天先进复合材料三维预制体成形技术与装备研究[J]. 机械工程学报, 2023, 59(20): 64-79.
doi: 10.3901/JME.2023.20.064 |
|
SHAN Zhongde, ZHOU Zhengxi, SUN Zheng, et al. Research on forming technology and equipment of three-dimensional preform for advanced composite materials in aerospace[J]. Journal of Mechanical Engineering, 2023, 59 (20):64-79.
doi: 10.3901/JME.2023.20.064 |
|
| [3] | YAO T, CHEN X, LI J, et al. Significantly improve the interlayer and in-plane properties of needled fabrics by novel none-felt needling technology[J]. Composite Structures, 2021. DOI: 10.1016/j.compstruct.2021.114303. |
| [4] | CHEN T, LIAO J, LIU G, et al. Effects of needle-punched felt structure on the mechanical properties of carbon/carbon composites[J]. Carbon, 2003, 41(5): 993-999. |
| [5] | OLRY P. Process for manufacturing homogeneously needled three-dimensional structures of fibrous material:4790052[P]. 1988-12-13. |
| [6] | DELECROIX V, DUVAL R. Fabricating three-dimensional annular fiber structures: 7251871[P]. 2007-8-7. |
| [7] | GAUTRONNEAU E, BOURY D, CHEVROLLIER A, et al. P80 nozzle low cost technologies[C]// 57th International Astronautical Congress. Valencia, 2006:C4. 2.05. |
| [8] |
陈小明, 李皎, 张一帆, 等. 回转结构预制体柔性针刺成型系统设计[J]. 纺织学报, 2020, 41(11): 156-161.
doi: 10.13475/j.fzxb.20190707806 |
| CHEN Xiaoming, Li Jiao, ZHANG Yifan, et al. Design of flexible needle forming system for rotary structure preform[J]. Textile Journal, 2020, 41 (11):156-161. | |
| [9] | CHEN X, ZHANG Y, XIE J, et al. Robot needle-punching path planning for complex surface pre-forms[J]. Robotics and Computer-Integrated Manufacturing, 2018, 52: 24-34. |
| [10] | CHEN X, ZHAO Y, ZHANG C, et al. Robot needle-punching for manufacturing composite preforms[J]. Robotics and Computer-Integrated Manufacturing, 2018, 50: 132-139. |
| [11] | 李皎, 陈利, 姚天磊, 等. 类回转预制体针刺机器人系统设计[J]. 纺织学报, 2023, 44(7):207-213. |
| LI Jiao, CHEN Li, YAO Tianlei, et al. Design of needling robot system for quasi-rotary preforms[J]. Journal of Textile Research, 2023, 44(7):207-213. | |
| [12] | 邵建娜, 张雅秀, 曾欣怡, 等. 机器人针刺成型异形预制体的路径规划[J]. 固体火箭技术, 2023, 46(4):600-610. |
| SHAO Jianna, ZHANG Yaxiu, ZHEN Xinyi, et al. Path planning for robot needle-punching forming of special-shaped preforms[J]. Journal of Solid Rocket Technology, 2023, 46(4): 600-610. | |
| [13] | 魏玉莹. 针刺/簇绒耦合增强复合材料设计制备与表征评价[D]. 天津: 天津工业大学, 2023: 13-22. |
| WEI Yuying. Design, preparation and characterization evaluation of needle/tufted coupling reinforced composites[D]. Tianjin: Tiangong University, 2023: 13-22. | |
| [14] | CHEN X, YAO T, CHEN L, et al. I-fiber implantation robot for composite parts[J]. Textile Research Journal, 2022, 92(3/4):383-399. |
| [1] | 丁彩红, 贺少旭. 管状织物的六角形三维编织工艺设计[J]. 纺织学报, 2025, 46(03): 216-224. |
| [2] | 杨露, 孟家光, 陈雨青, 支超. 基于废旧纺织品的湿度响应纤维素/聚氨酯复合材料的制备及其性能[J]. 纺织学报, 2025, 46(02): 26-34. |
| [3] | 刘仁义, 杨琴, 孙宝忠, 顾伯洪, 张威. 织物增强复合材料的电热驱动形状记忆回复行为[J]. 纺织学报, 2025, 46(01): 72-79. |
| [4] | 郭艳文, 黄晓梅, 曹海建. 增强体结构对三维角联锁复合材料抗冲击性能的影响[J]. 纺织学报, 2025, 46(01): 80-86. |
| [5] | 左红梅, 高敏, 阮芳涛, 邹梨花, 徐珍珍. MXene-氧化石墨烯改性碳纤维/聚乳酸复合材料制备及其力学性能[J]. 纺织学报, 2025, 46(01): 9-15. |
| [6] | 孙戬, 王彤, 陈云辉, 林何, 刘晖, 成小乐. 织物增强橡胶基复合材料本构模型及其应用[J]. 纺织学报, 2025, 46(01): 95-102. |
| [7] | 郭琦, 吴宁, 孟影, 安达, 黄建龙, 陈利. 变厚度头锥体织物的工艺设计与验证[J]. 纺织学报, 2024, 45(12): 98-108. |
| [8] | 余晓佩, 沈伟, 陈立峰, 竺铝涛. 玻璃纤维复合材料损伤裂纹修复及其性能评价[J]. 纺织学报, 2024, 45(11): 121-127. |
| [9] | 肖渊, 童垚, 胡呈安, 武贤军, 杨磊鹏. 导电复合材料涂覆式全织物基柔性压阻传感器制备[J]. 纺织学报, 2024, 45(10): 152-160. |
| [10] | 姜梦敏, 王一璠, 金欣, 王闻宇, 肖长发. 聚吡咯共轭结构对碳纤维增强树脂基复合材料热循环稳定性能的影响[J]. 纺织学报, 2024, 45(10): 23-30. |
| [11] | 周领辉, 祝成炎, 金肖克, 马雷雷, 陈海相, 田伟. 基于三维显微镜成像的墨西哥红酸枝内部纤维分布及结构形态表征[J]. 纺织学报, 2024, 45(09): 56-62. |
| [12] | 吕丽华, 庞现柯, 刘澳. 变厚度三维机织复合材料的抗冲击性能[J]. 纺织学报, 2024, 45(09): 91-96. |
| [13] | 陈小明, 吴凯杰, 郑宏伟, 张敬义, 苏星兆, 辛世纪, 郭东升, 陈利. 针刺/缝合多尺度联锁复合材料I型层间力学行为[J]. 纺织学报, 2024, 45(08): 173-182. |
| [14] | 李天宇, 沈伟, 陈立峰, 竺铝涛. 三维角联锁机织复合材料的制备及其弯曲压缩失效机制[J]. 纺织学报, 2024, 45(08): 183-189. |
| [15] | 马亮, 俞旭华, 刘文武, 李慈, 方以群, 李俊, 徐佳骏. 气凝胶复合材料在干式潜水服内胆隔热性能提升中的应用[J]. 纺织学报, 2024, 45(07): 181-188. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号