纺织学报 ›› 2026, Vol. 47 ›› Issue (1): 207-213.doi: 10.13475/j.fzxb.20250804101
王建萍1,2,3,4, 储林萍1,2,3, 沈津竹1,2,3,5( ), 张帆6
), 张帆6
WANG Jianping1,2,3,4, CHU Linping1,2,3, SHEN Jinzhu1,2,3,5(), ZHANG Fan6
摘要:
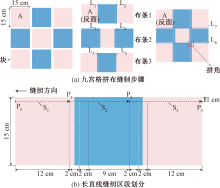
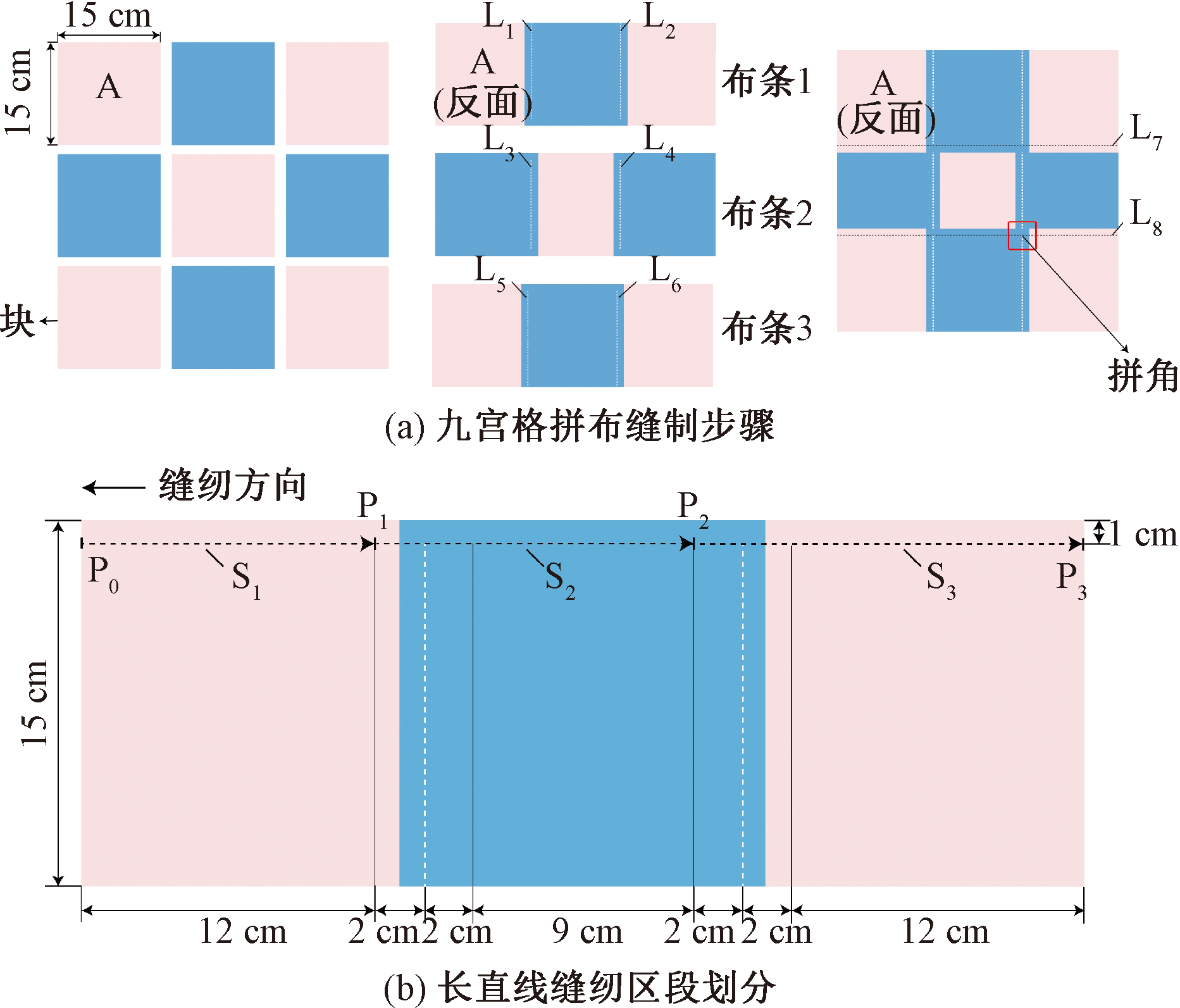
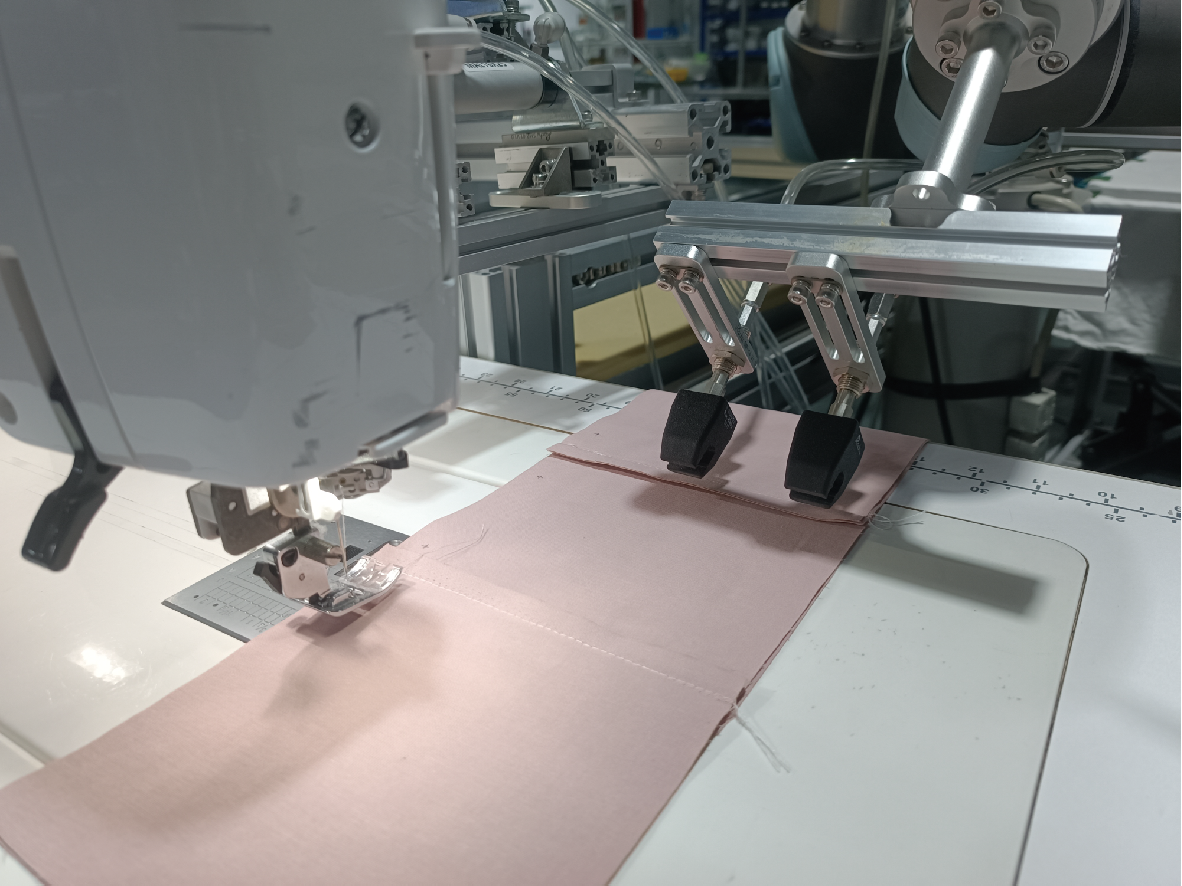
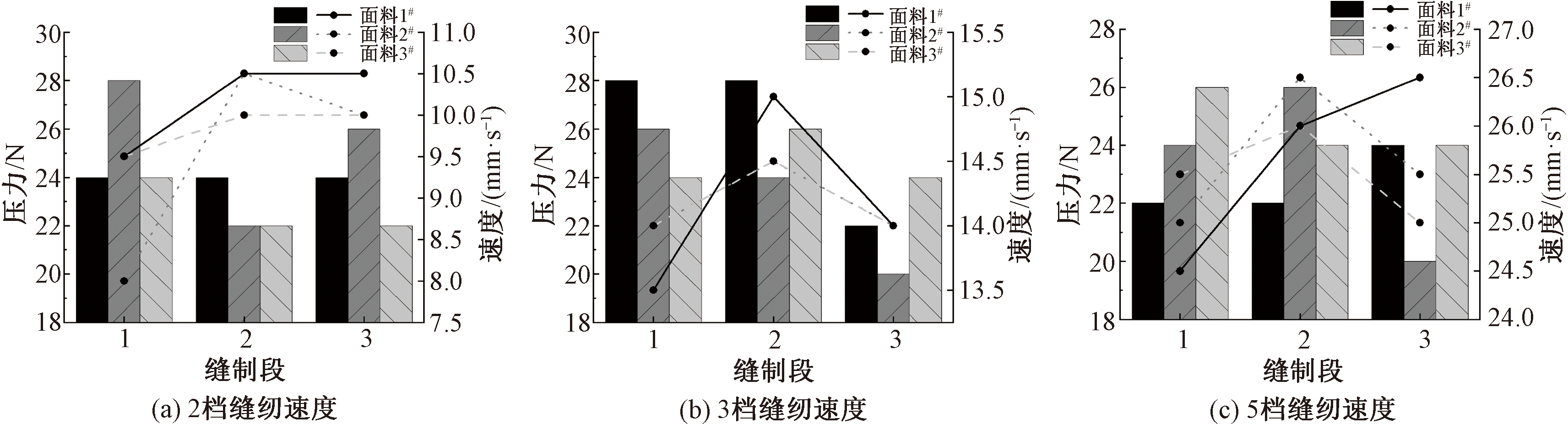
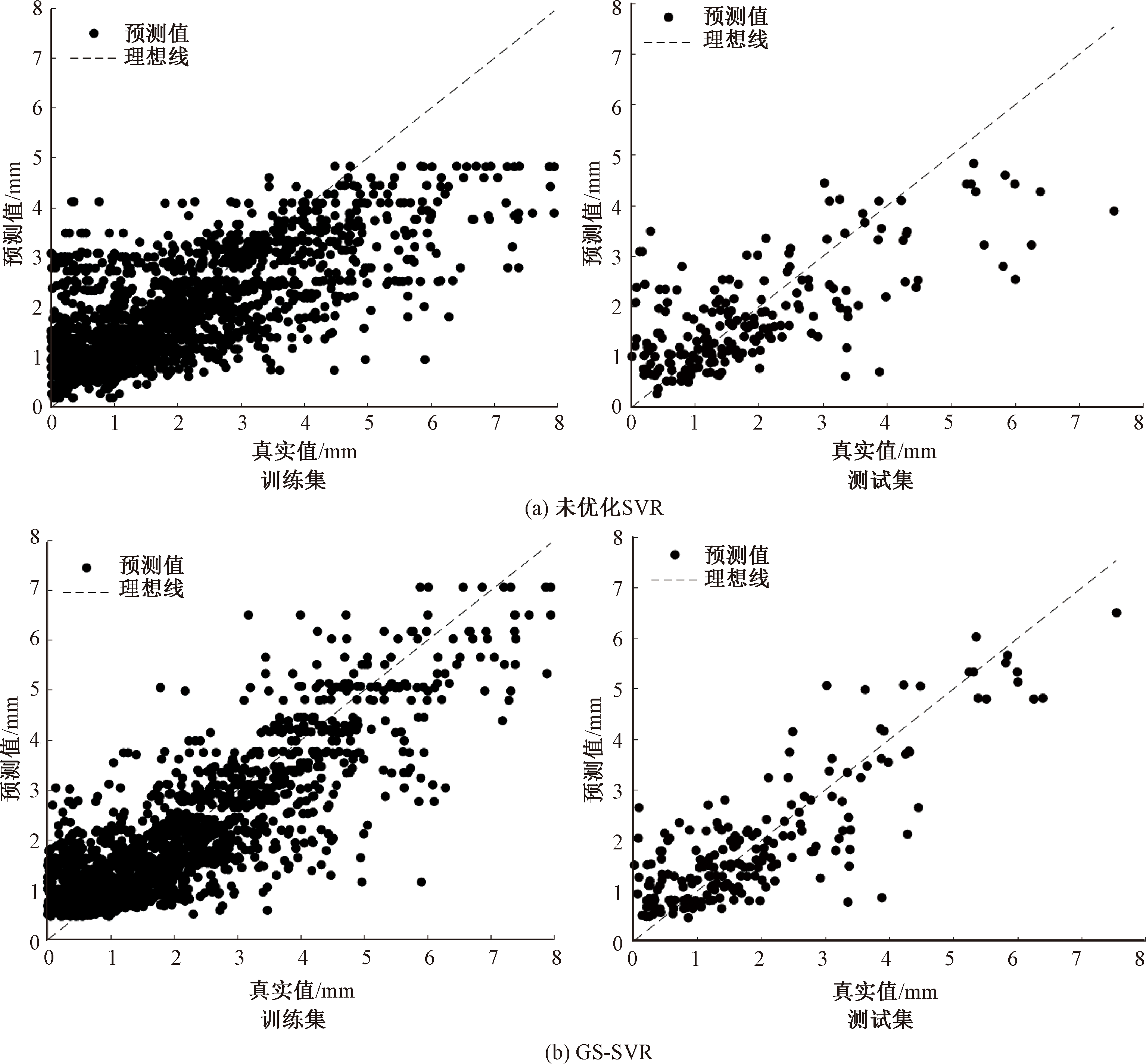
为探究不同缝纫速度下,软体手指对面料按压力与送布速度组合对长直线缝纫偏差的影响,以九宫格拼布工艺中的2条布条拼接阶段为研究对象,选择拼布常用的3种纯棉面料,将长直线缝纫轨迹划分为3个缝纫区段进行3次循环直线缝纫。结合力控技术,使用软体手指作为UR5机械臂末端执行器按压送布,以软体手指的压力和速度作为试验因素,每个因素均设计5个水平,进行L25(52)正交试验。通过极差分析与方差分析发现:不同缝纫速度下,3种面料的3个循环缝制段对应的最佳软体手指压力与速度组合存在差异,且软体手指的压力、速度及其交互作用对缝纫偏差的影响也因缝纫速度和循环缝制段的不同而不同。进一步构建支持向量回归模型,对缝纫偏差进行预测,并分别采用网格搜索、贝叶斯优化与粒子群优化方法进行超参数优化。优化结果表明:优化后模型在训练集与测试集上的表现均显著优于未优化模型,使用网格搜索优化得到的模型泛化能力和优化效率最佳(均方根误差为0.039 7 mm,优化耗时为26.52 s)。
中图分类号:
| [1] | 吴柳波, 李新荣, 杜金丽. 基于轮廓提取的缝纫机器人运动轨迹规划研究进展[J]. 纺织学报, 2021, 42(4): 191-200. |
| WU Liubo, LI Xinrong, DU Jinli. Research progress on trajectory planning of sewing robot based on contour extraction[J]. Journal of Textile Research, 2021, 42(4): 191-200. | |
| [2] |
LÁZÁR K. Industrial robots in the textile and clothing industry[J]. International Journal of Industrial and Manufacturing Systems Engineering, 2024, 9(1): 1-9.
doi: 10.11648/j.ijimse |
| [3] |
KOUSTOUMPARDIS P N, ASPRAGATHOS N A. Intelligent hierarchical robot control for sewing fabrics[J]. Robotics and Computer-Integrated Manufacturing, 2014, 30(1): 34-46.
doi: 10.1016/j.rcim.2013.08.001 |
| [4] |
付天宇, 李凤鸣, 崔涛, 等. 基于视觉/力觉的机器人协同缝制系统[J]. 机器人, 2022, 44(3): 352-360.
doi: 10.13973/j.cnki.robot.210414 |
|
FU Tianyu, LI Fengming, CUI Tao, et al. A robotic collaborative sewing system based on visual and force perception[J]. Robot, 2022, 44(3): 352-360.
doi: 10.13973/j.cnki.robot.210414 |
|
| [5] |
王晓华, 王育合, 张蕾, 等. 缝纫机器人对织物张力与位置的模糊阻抗控制[J]. 纺织学报, 2021, 42(11): 173-178.
doi: 10.13475/j.fzxb.20200605706 |
|
WANG Xiaohua, WANG Yuhe, ZHANG Lei, et al. Fuzzy impedance control of sewing robot for fabric tension and position[J]. Journal of Textile Research, 2021, 42(11): 173-178.
doi: 10.13475/j.fzxb.20200605706 |
|
| [6] |
KOSAKA N, CHIDA Y, TANEMURA M, et al. Real-time optimal control of automatic sewing considering fabric geometric shapes[J]. Mechatronics, 2023, 94: 103005.
doi: 10.1016/j.mechatronics.2023.103005 |
| [7] |
LI F M, HOU D, FU T Y, et al. Research on robot sewing method based on process modeling[J]. International Journal of Intelligent Robotics and Applications, 2024, 8(2): 401-421.
doi: 10.1007/s41315-024-00326-1 |
| [8] |
TANG K, TOKUDA F, SEINO A, et al. Time-scaling modeling and control of robotic sewing system[J]. IEEE/ASME Transactions on Mechatronics, 2024, 29(4): 3166-3174.
doi: 10.1109/TMECH.2024.3398713 |
| [9] |
ZHU Y X, SHEN J Z, WANG J P, et al. A study on the formulation of process parameters for soft finger-assisted fabric stitching[J]. International Journal of Clothing Science and Technology, 2024, 36(6): 1004-1019.
doi: 10.1108/IJCST-01-2024-0001 |
| [10] |
WANG J P, SHEN J Z, YAO X F, et al. Research progress of automatic grasping methods for garment fabrics[J]. International Journal of Clothing Science and Technology, 2023, 35(6): 997-1022.
doi: 10.1108/IJCST-05-2023-0068 |
| [11] | 王建萍, 朱妍西, 沈津竹, 等. 软体机器人在服装领域的应用进展[J]. 纺织学报, 2024, 45(5): 239-247. |
| WANG Jianping, ZHU Yanxi, SHEN Jinzhu, et al. Application progress of soft robot in clothing field[J]. Journal of Textile Research, 2024, 45(5): 239-247. | |
| [12] | 王建萍, 沈津竹, 姚晓凤, 等. 服装裁片自动抓取技术及其布局方法的研究进展[J]. 纺织学报, 2024, 45(6): 227-234. |
| WANG Jianping, SHEN Jinzhu, YAO Xiaofeng, et al. Research progress on automatic grasping technology and layout method of garment cutting pieces[J]. Journal of Textile Research, 2024, 45(6): 227-234. | |
| [13] |
SMOLA A J, SCHÖLKOPF B. A tutorial on support vector regression[J]. Statistics and Computing, 2004, 14(3): 199-222.
doi: 10.1023/B:STCO.0000035301.49549.88 |
| [14] |
DONG Z B, YANG D Z, REINDL T, et al. A novel hybrid approach based on self-organizing maps, support vector regression and particle swarm optimization to forecast solar irradiance[J]. Energy, 2015, 82: 570-577.
doi: 10.1016/j.energy.2015.01.066 |
| [15] |
YANG L, SHAMI A. On hyperparameter optimization of machine learning algorithms: theory and practice[J]. Neurocomputing, 2020, 415: 295-316.
doi: 10.1016/j.neucom.2020.07.061 |
| [1] | 王建萍, 翁雨鑫, 沈津竹, 张帆, 刘霂珂. 基于软体手指的自动翻布装置及其应用效果[J]. 纺织学报, 2025, 46(01): 197-205. |
| [2] | 王建萍, 沈津竹, 姚晓凤, 朱妍西, 张帆. 服装裁片自动抓取技术及其布局方法的研究进展[J]. 纺织学报, 2024, 45(06): 227-234. |
| [3] | 王晓华, 王育合, 张蕾, 王文杰. 缝纫机器人对织物张力与位置的模糊阻抗控制[J]. 纺织学报, 2021, 42(11): 173-178. |
| [4] | 谷有众 高卫东 卢雨正 刘建立 杨瑞华. 应用遗传算法优化支持向量回归机的喷气涡流纺纱线质量预测[J]. 纺织学报, 2016, 37(07): 142-148. |
| [5] | 尹丽敏 邓炳耀 刘庆生 唐继春. 热定型工艺对底网针刺造纸毛毯性能的影响[J]. 纺织学报, 2015, 36(03): 48-53. |
| [6] | 田慧欣 贾玉凤. 基于集成多支持向量回归融合的上浆率在线软测量方法[J]. 纺织学报, 2014, 35(1): 62-0. |
| [7] | 杜兆芳, 黄芙蓉. 苎麻复合微生物脱胶工艺优化[J]. 纺织学报, 2012, 33(5): 56-61. |
| [8] | 余天石;郭欣欣;邱华;葛明桥. 利用废弃聚酯合成Gemini型表面活性剂[J]. 纺织学报, 2010, 31(4): 20-24. |
| [9] | 牟俊玲;邱华;葛明桥. 旋流器对环锭纺纱线性能的影响[J]. 纺织学报, 2009, 30(11): 43-47. |
| [10] | 鞠成君;隆棣;俞建勇;薛文良. 平行股线纺纱气压的组合优选[J]. 纺织学报, 2009, 30(05): 25-27. |
| [11] | 白秀娥;管新海. PTT纤维碱处理工艺条件的优化[J]. 纺织学报, 2008, 29(5): 15-18. |
| [12] | 伍建国;翦育林;汪朝光. 竹原纤维染色工艺[J]. 纺织学报, 2008, 29(10): 70-72. |
| [13] | 韩建;徐国平;袁利华. PLAP黄麻多层复合材料的工艺优化及力学性能[J]. 纺织学报, 2007, 28(11): 40-44. |
| [14] | 李连举. 棉织物氧化一浴法前处理工艺[J]. 纺织学报, 2005, 26(6): 109-111. |
| [15] | 汪澜;曾军英;严峻. 丝/毛混纺织物的同色性染色技术[J]. 纺织学报, 2005, 26(6): 44-46. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号