



在此,本文综述了纤维/织物变形材料(驱动器)的最新研究进展,阐述了各种刺激响应下材料的驱动变形原理,并着重介绍了变形-感知一体式智能纤维/织物的应用。最后,探讨了智能变形纤维/织物材料面临的主要挑战,并展望其未来发展方向,以期为领域的研究和发展提供参考。
1 驱动方式
纤维/织物驱动器可在外部刺激下实现复杂变形,该过程无需复杂的能量转换装置,即可将外部刺激转换为机械能,并可在外部刺激消失时恢复原状。本节综述了几种典型的外部刺激(电、光、湿、磁、气动)作用下,纤维/织物驱动器的驱动机制与研究进展。
1.1 电驱动
电是常用且高度可控的能源。电驱动纤维/织物材料响应快,易于控制和集成到现有的电子器件中,潜力巨大。基于不同材料,电驱动机制主要分为电场诱导驱动、电化学驱动、电磁场诱导驱动和电流诱导焦耳热效应[18]。
电场诱导驱动通常需要较高电压,常见的驱动方式包括压电驱动和介电驱动。压电驱动是通过压电材料(如压电陶瓷[19]、柔性压电聚合物[20])中随机取向的极化分子基团,在强电场作用下有序变化,从而引起材料整体的变形。压电陶瓷在外部电场下其内部非中心对称晶体结构中的极化分子基团(如钛酸钡中的Ti4+和O2-)会发生定向位移,导致晶体内部的电荷分布发生变化,从而使晶体晶格发生畸变,表现为材料宏观变形[21];柔性压电聚合物(如聚偏氟乙烯(PVDF))分子链中的极性基团(如—CH2—CF2—)在电场作用下会发生旋转和重新排列,导致分子链构象变化,引起材料整体变形[22]。介电驱动是介电弹性体在电场作用下,受电极间电荷积累产生的麦克斯韦应力作用而发生电场方向的体积收缩和垂直于电场方向上拉伸形变,这种应力分布引起材料的宏观形变[23]。为了具有良好的驱动性能,电极与介电层需结合紧密,且器件刚度应较低[24]。此外,采用各向异性结构可以限制纤维驱动器的径向变形,增强其轴向变形[25]。尽管电场诱导的驱动器展现出高效率、高应变和高能量密度的优势,但高电压容易有击穿隐患,在实际应用中需要考虑其安全性。
相比之下,电化学纤维/织物驱动器可在较低电压下工作,通过带电粒子嵌入/脱嵌电极材料(如低维纳米材料[26]、导电聚合物[27]等),实现材料体积膨胀和收缩(如图1所示)。有机电解质被广泛用于电化学驱动器[28],其较高的分解电位和较大的离子尺寸有利于提高驱动性能。然而其易燃性、毒性、高成本以及低离子电导率,阻碍了其实际应用。相比之下,无机水性电解质因其生物相容性、低成本以及良好的离子电导率,成为更理想的选择[29]。中国科学院苏州纳米所李清文课题组[30]利用磷酸盐缓冲溶液(PBS)作为电解质,开发了一种碳纳米管(CNT)/聚苯胺(PANI)纤维驱动器。该驱动器可在低于2 V的电压下实现17%的收缩行程和8 MPa的应力输出,且在50次驱动循环后仍保持稳定驱动性能。该纤维驱动器能在其它生物相容性溶液(如生理盐水和Na2SO4溶液)中工作,有望拓展纤维驱动器在植入式人工肌肉领域的应用。
图1

当电流流过螺旋排列的导电纤维时,纤维间电磁场的相互排斥会增加纤维间距,从而实现纤维伸缩和旋转。复旦大学彭慧胜课题组[31]通过将螺旋状CNT纤维缝合至Kapton薄膜上,并将其缠绕在固定轴上进行热定形,制备出螺旋状的带状驱动器。当电流通过CNT纤维时,纤维间电磁场的相互排斥使得器件旋转。带状驱动器的伸/缩变形取决于螺旋状纤维和条带的手性方向。
在实际应用中,单个电驱动纤维驱动器产生的应力往往不足以满足实际需求。将纤维驱动器编织成织物,有望精确控制局部变形,提供更快更强的变形性能及增强的耐用性[37]。
1.2 湿气驱动
具备大量纳米级和微米级孔隙的加捻螺旋结构纱线,可显著提升材料的湿响应性[28]。香港理工大学胡金莲课题组[53]通过包缠纱技术,在疏水涤纶长丝外包覆亲水粘胶纤维,设计了一种具有螺旋-芯鞘结构包缠纱线驱动器。由于纤维间大量孔隙和芯鞘间高效的液体传导作用,该驱动器实现了高扭转行程(5 815 (°)/cm)和工作容量(23.5 J/kg),且在50次循环测试中表现出高驱动稳定性;然而,该器件在湿度变化小的环境中难以发挥性能。通过将吸湿材料引入多尺度螺旋结构内,可进一步增强材料湿响应驱动性能。采用此策略开发的海藻酸盐/PU纱线驱动器,能够承受高达300%的拉伸应变,并在湿气刺激下展现出5.2%/s的膨胀速率和3.1%/s的收缩速率,驱动器经50次循环后仍保持稳定驱动性能[54]。
图2

1.3 光驱动
光热驱动的机制包括2种。一种是利用2种材料的热膨胀系数差异,在光照下产生不同程度的变形,诱导整体产生驱动变形[59]。例如,青岛大学田明伟课题组[60]将MXene/聚酰胺(PA)长丝和聚丙烯(PP)复合构成了光热响应纤维驱动器,由于材料的热膨胀系数差异,该驱动器在较低阳光功率(100 mW/cm)下展现出1.38 cm-1的弯曲曲率,在1 000次循环后其驱动性能无明显退化,能够举起高于自重11倍的负载。然而,该驱动器对阳光依赖程度较高,在光照不足或光照条件复杂多变的环境下性能受限。通过热/冷拉伸技术可改变纤维内部的分子排列和结构,从而影响材料的力学、光学及刺激响应特性,提升纤维驱动器的性能[61-62]。麻省理工学院Polina Anikeeva课题组[63]利用冷拉伸工艺,对环己烯共聚物弹性体(COCe)和聚乙烯(PE)构成的纤维进行拉伸处理。借助2种材料的弹性模量差异,拉伸后实现了类似卷须弹簧的纤维驱动器。光热刺激下,该驱动器能够收缩和伸长,承受超过1 000%的应变,并举起超过自重650倍的物体,经300次循环后其驱动性能无明显下降。然而,纤维驱动器受限于材料维度特征,通常结构设计较为单一。通过精确控制纤维形貌、排列方式以及功能层厚度比,静电纺丝纤维膜能够一体式开发光热变形行为丰富的驱动器。东华大学熊佳庆课题组[64]开发了一种具有非对称结构致密度的纤维膜。由于两侧纤维膜的热膨胀系数和热管控能力差异,该纤维膜在红外光照射下可在30 s内实现高达2.2 cm-1的弯曲曲率,且耐受20次光热循环变形。然而,该双层纤维膜的微观结构和界面稳定性可调性受限,其驱动性能难以进一步提升。热压技术是同步提高纤维膜力学性能和光热转换效率的有效手段。基于此,熊佳庆课题组[57]通过热压技术创新性开发了一种机械-光热协同增强的纤维膜,同步实现了纤维膜光热响应微结构和力学性能调控。这种同时具有优异模量(378 MPa)和韧性(87.26 MJ/m3)的纤维膜与导电织物胶带复合,可实现制备具有较快响应(0.068 cm-1/s)和较大形变(0.63 cm-1)的纤维膜驱动器,且在1 000次光热循环后仍保持良好的驱动性能,表现出优异的界面稳定性和器件耐久性。
光热驱动的另一种机制是利用2种材料的吸湿膨胀性能差异,即在高湿/光照下,由于材料水分吸收/蒸发程度不同,导致材料体积变化不同,进而诱导整体产生驱动变形[65]。在自然环境中,湿气与光热刺激往往同时存在、相互影响,协同二者刺激实现材料高效变形挑战巨大。熊佳庆课题组[14]通过连续静电纺丝制备了MOF/PEO-MXene/PVDF双层非对称全纤维膜驱动器。由于两侧吸湿膨胀性能的差异,以及在2层材料中引入了吸湿和光热增强填料。该驱动器具有超快响应速率(0.60 cm-1/s)和巨大弯曲曲率(7.23 cm-1),并能够在光热和湿气刺激下实现双向弯曲驱动(见图3),在100次往复变形后其驱动性能无明显衰减。通过工艺调控提升其界面稳定性有望进一步提升驱动器的变形寿命。
图3
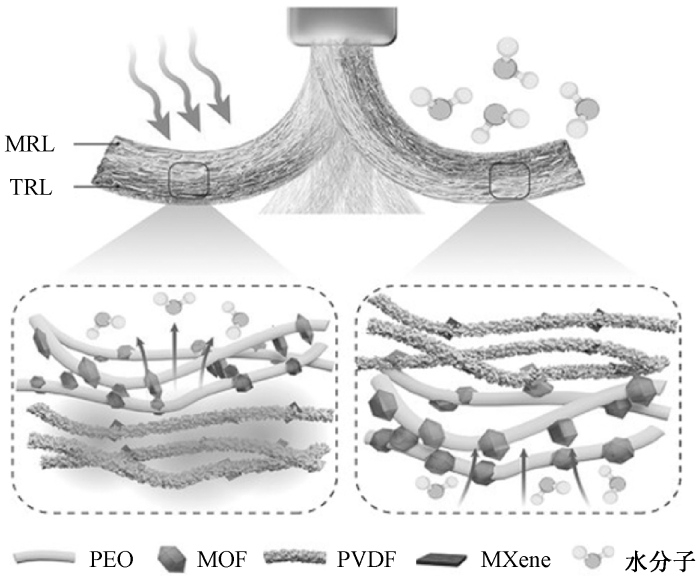
图3
光热-水分响应的非对称全纤维膜驱动器
注:MRL表示湿响应层;TRL表示热响应层。
Fig.3
Asymmetric all-fiber film actuator with photothermal-moisture response
1.4 磁驱动和气动驱动
除上述常规驱动方式外,磁驱动和气动驱动借助外部磁场或气压来实现材料变形,具有大应力、大应变以及快速响应的优势。
向聚合物中添加磁响应物质易实现磁驱动[66]。磁驱动纤维/织物的响应机制主要有2种:一种是将驱动器放置在交变磁场中,通过电磁加热效应使磁性材料温度升高,材料受热发生膨胀或相变,从而产生驱动[20]。例如,德国马普所Metin Sitti课题组[67]开发的螺旋纤维驱动器中添加了Fe3O4纳米颗粒,这些颗粒在射频磁场作用下会升温,导致纤维受热膨胀,其内部应力分布发生变化,促使螺旋纤维驱动器进行收缩和扭转运动。另一种是利用纤维中的磁性材料与外部磁场相互作用,导致纤维发生收缩、伸长或弯曲等变形[68]。例如,麻省理工学院Polina Anikeeva课题组[41]使用热拉伸工艺制备了具有磁性填料同轴纤维,在磁场作用下纤维可执行多种运动,包括爬行、行走和游泳(见图4(a))。
图4
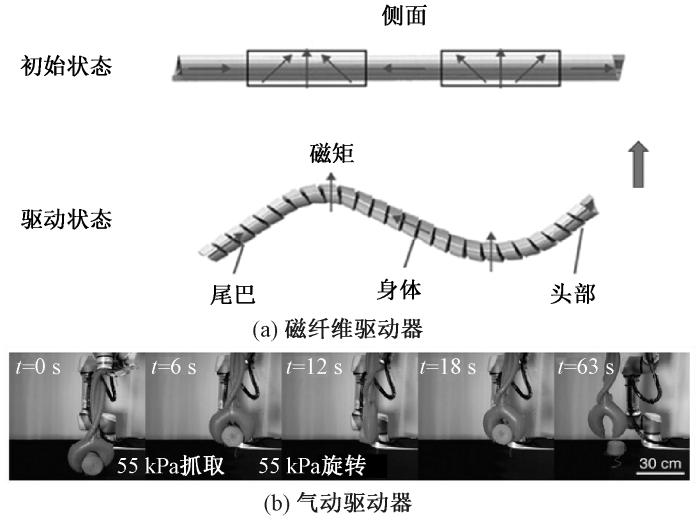
图4
纤维基磁/气动响应驱动器
Fig.4
Fiber-based magnetic/pneumatic responsive actuator.
(a) Magnetic fiber actuator; (b) Pneumatic fabric actuator
总体上,电刺激具有高可控性,但实现无束缚变形材料难度较大,纤维/纱线状电池的开发和集成是可能的解决方案之一。湿气和光响应变形材料的主要优势在于刺激源广泛,主要挑战在于刺激源的无序性和低可控性,纤维基材料具有微结构/孔隙可调性,实现对刺激源入射/传播路径的调控有望放大驱动变形可控性。磁控和气控的驱动效率高,但使用场景相对受限。未来,多响应模态的集成和协同工作可有效提升变形材料的响应效率,拓展其场景适应性和实用性。
2 驱动-感知一体式应用
近年来,驱动器越来越多地被赋予传感功能。实现变形-传感一体化是提升驱动器和软体机器人智能属性的重要步骤。变形使驱动器能够完成操控或行走等基本动作,助力其执行任务;传感则充当驱动器的视觉或触觉器官,允许驱动器实现对环境信息或自身状态的实时监测和反馈。二者协同作用下的驱动器有望实现与外部环境的主动交互。当前,驱动-感知一体式纤维基驱动器的应用主要集中在人工肌肉和微型软体机器人2个方面。
2.1 人工肌肉
纤维驱动器具备出色柔韧性和快速响应能力,其扭曲收缩与解扭舒张行为能够近似模拟肌肉的运动状态。模仿肌肉的驱动-传感双重功能,一直是领域研究人员面临的挑战。随着导电材料和传感模块的不断细化,有望实现驱动-传感功能的无缝整合。
在纤维材料上整合传感功能主要主要有2种方法。最常见的是在纤维表面构建导电涂层。例如,中国科学院苏州纳米技术与纳米仿生研究所李清文课题组[73]通过将聚二甲基硅氧烷(PDMS)薄膜包裹CNT纤维并加捻扭转,进行表面处理涂覆MXene/单壁碳纳米管(SWCNTs),制备了一种多功能同轴纤维。由于MXene/SWCNTs层的压阻效应,其电阻变化与同轴纤维的驱动(拉伸或收缩)呈线性关系,从而实现纤维位置自传感。
此外,将导电填料引入聚合物基质,通过共混纺丝也可实现驱动与感知功能整合。例如,东华大学王华平课题组[74]开发了一种螺旋纤维驱动器,由海藻酸钠(SA)/聚吡咯(PPy)和SA/氧化石墨烯(GO)平行湿纺后经过加捻制成。该驱动器可在红外辐射和湿度刺激下发生扭转和解扭,同时感知自身的收缩与舒张。其传感原理是纤维驱动过程中PPy网络密度的变化导致电阻值变化,基于此建立纤维扭转和解扭时产生的应变与电阻间的线性关系。
尽管目前通过检测人工肌肉驱动过程中的电容或者电阻值变化,可实时感知器件的形变和运动,但是仍较难实现对感知信号的自反馈并按需调控器件自身动作。近年来,有研究尝试通过额外集成电子反馈与控制系统,可实现人工肌肉的驱动、感知和反馈一体化。例如,天津大学封伟课题组[32]开发了一种具备感知-驱动-自反馈功能的多层同轴纤维。该纤维由液态金属(LM)芯层、LCE鞘层和超薄黏附层构成。该人工肌肉纤维束在7.5 V直流电压下可于0.12 s内完成高达98%的变形收缩。通过并联多根纤维,形成感知与驱动信号互通的纤维束,在感知到外力变形时能自适应收缩。这类技术在智能织物、软体机器人、机械外骨骼等领域有重要应用潜力。
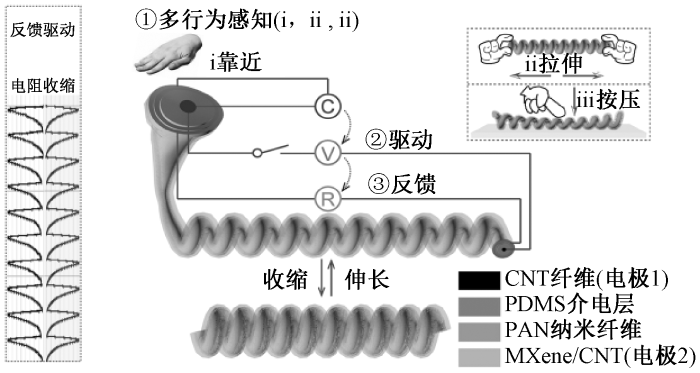
当前,人工肌肉纤维的驱动层与传感层之间多存在界面匹配差等问题,导致传感功能在循环过程中容易失效,这限制了其持续工作能力。鉴于此,中国科学院苏州纳米所李清文课题组[75]受蜗牛触角启发,开发了具有3层同轴结构的人工神经肌肉纤维。该纤维由内到外依次由CNT纤维芯层、PDMS介电层、聚丙烯腈(PAN)纳米纤维界面层和MXene/CNT鞘层组成(见图5)。CNT纤维芯层通过焦耳热效应使PDMS层体积变化,将径向膨胀转化为轴向收缩实现纤维驱动。MXene/CNT外鞘利用电阻应变特性实现压力和应变感知,并利用电容变化感知外界物体的接近,同时利用应变相关压阻效应实现反馈功能。PAN纳米纤维界面层的引入,增强了材料间界面结合,有利于信号的稳定传输。
图5
2.2 软体机器人
一维的纤维/纱线驱动器可以实现线性运动,常被用作人工肌肉或在一些体积有限的场景中实现机器人应用。然而,一维的纤维/纱线驱动器的运动自由度相对有限。整合多个一维驱动器可实现更多样化的功能。例如,清华大学杨忠强课题组[76]利用熔融纺丝技术,制备了集驱动与传感功能于一体的LCE-LM同轴纤维,并将3根纤维驱动器组装成一个三臂Delta机器人。该机器人能够通过电阻变化来感知物体质量、进行分拣操作,以及实时监测运动过程。
相比纤维或纱线,纤维膜在结构、材料与功能方面具有极高的可设计和编程性,有望在驱动和传感功能上赋予更多可能性[77]。东华大学熊佳庆课题组[14]通过连续静电纺丝制备了MOF/PEO-MXene/PVDF非对称响应双层纤维膜驱动器。该驱动器能够双向响应光热和湿气刺激,通过纤维结构、取向和厚度协同设计,证实了二维-三维结构可编程的多样化驱动器。结合摩擦电效应,实现了驱动器自感知能力,例如可感知物体温度/湿度、识别基底材质、环境湿度/光强,以及昆虫等刺激(见图6(a))。此外,该课题组针对环境中的电磁辐射(EMR),利用尺蠖和竹排启发,设计了一种具有水-陆自适应运动的微纤维基两栖软体机器人,其在红外光照射下可连续行进,并基于电磁感应原理实现运动过程中EMR的动态感知(见图6(b))[57]。
图6
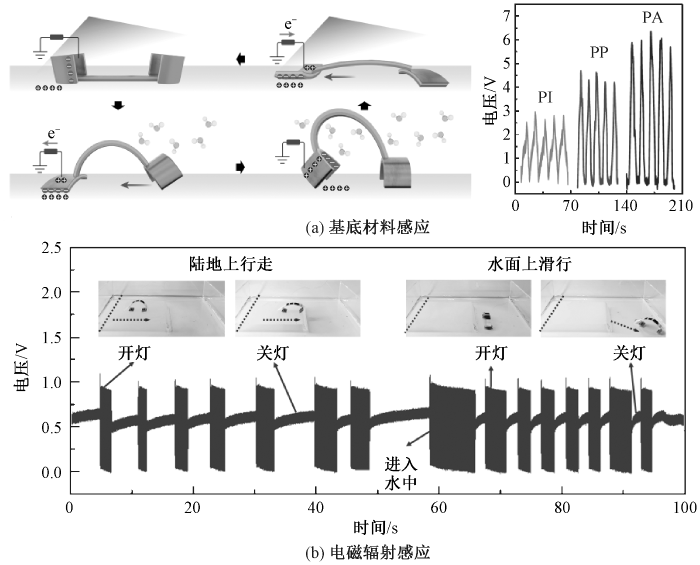
图6
变形-感知一体的软体机器人
Fig.6
Self-perceptive soft robot.
(a) Substrate materials sensing; (b) Electromagnetic radiation sensing
此外,折纸技术也是实现驱动器结构编程的有效手段,利用不同折痕设计,能够实现驱动器形状、尺寸和运动特性的可逆变换。例如,马里兰大学Po-Yen Chen课题组[78]通过将纤维素纤维经GO浸渍、镀铂、高温炭化和PDMS封装,开发了一种折纸机器人,并基于应变传感实现了机器人运动的实时监测。通过电阻变化可监测机器人的直线爬行和转弯状态,以及移动方向和路径。
这些集成了传感功能的纤维基柔性驱动器多样化设计策略大大推动了人工肌肉和软体机器人的发展,有望实现智能器件与外界环境(生物体、环境接触/非接触刺激等)的主动交互,尤其对特种或极端环境信息的主动采集有重要意义。要实现这些目标,需要进一步增强驱-感一体式纤维基驱动器在复杂环境(如强电磁干扰、极端温度与湿度并存)下的变形效率和感知精度。通过探索材料的高湿/热稳定性、电磁屏蔽性和智能封装技术,有望实现复杂环境下的高性能/高稳定型变形感知材料和器件,保障极端场景下的驱-感一体功能和稳定信息交互。
3 结束语
纤维和织物在变形-感知一体式智能材料的设计和开发上有重要优势,然而,这个方向仍处于初期探索阶段,且涉及高度交叉研究,尚存在诸多挑战。
1)深化机制研究。纤维/织物涉及多材料和多层次/多样化结构,其变形过程相对复杂,尤其微观单元的连续/动态变形很大程度决定材料的宏观变形性能,从机制上明确材料微观-宏观变形能力之间的构效关系至关重要。借助仿真模拟/机器学习技术,从微观上指导调控纤维取向、结晶度、孔隙率等因素,结合多场耦合技术实现多因素协同工作和增效,有望从本质上提升纤维/织物材料的宏观变形性能和效率。
2)高效变形和长效稳定。纤维/织物材料的驱动变形应力和效率相对较低,且长效变形稳定性不足。从材料和结构创新方面有望解决这些挑战,如选用高性能原料、对纤维进行原位或后端改性、优化纱线/织物结构、或采用图案化编织等技术均可有效提升材料变形性能,且协同多因素工作有望进一步增强其性能。开发或引入弹性体可提升材料抗疲劳性,自修复材料则助于延长器件寿命。再者,一些特殊场景可采用绿色可降解原料,确保器件完成变形任务但不产生电子垃圾。此外,智能封装技术有望从后端改善变形材料在恶劣环境下(如高湿度、低温或高温、强磁场等)的运行可靠性。
3)规模化与智能化。驱-感一体变形材料的实现依赖传感单元甚至电源等功能模块,多模块的无缝集成实现其规模化和智能化是另一主要挑战。从变形纤维/纱线单元入手,提升其力学稳定性和编织耐受性是核心;同时,利用传统编织技术实现变形材料的图案化编织可合理布控功能模块,突破集成难题;此外,这类高性能变形纤维/纱线将允许规模化编织和加工,推动产业化和商业化。基于此,通过丰富传感纤维模块的电学功能和传感属性,解决编织过程中的信号串扰等问题,将有助于丰富变形材料的感知能力,提升其信息采集能力和环境主动交互能力。可以想象,未来,纤维/织物类智能变形材料的发展将大大推动各类响应性智能设备/装备的发展,有望服务于人们生活生产、环境医疗和航空航天等领域。
参考文献
Locomotion dynamics of hunting in wild cheetahs
[J].
Global circumnavigations: tracking year-round ranges of nonbreeding albatrosses
[J].Although albatrosses are paradigms of oceanic specialization, their foraging areas and migration routes when not breeding remain essentially unknown. Our continuous remote tracking of 22 adult gray-headed albatrosses for over 30 bird-years reveals three distinct strategies: (i) Stay in breeding home range; (ii) make return migrations to a specific area of the southwest Indian Ocean; and (iii) make one or more global circumnavigations (the fastest in just 46 days). The consistencies in patterns, routes, and timings offer the first hope of identifying areas of critical habitat for nonbreeding albatrosses, wherein appropriate management of longline fisheries might alleviate the plight of the world's most threatened family of birds.
Active textile fabrics from weaving liquid crystalline elastomer filaments
[J].
Liquid crystal elastomer artificial tendrils with asymmetric core-sheath structure showing evolutionary biomimetic locomotion
[J].
Knotted artificial muscles for bio-mimetic actuation under deepwater
[J].
Soft and lightweight fabric enables powerful and high-range pneumatic actuation
[J].
Miniaturized and untethered McKibben muscles based on photothermal-induced gas-liquid transformation
[J].
Hierarchically structured and scalable artificial muscles for smart textiles
[J].
软体机器人在服装领域的应用进展
[J].
Advances in application of soft robot in the apparel field
[J].
Magnetically controlled reversible shape-morphing microrobots with real-time X-ray imaging for stomach cancer applications
[J].
Systematic review on wearable lower extremity robotic exoskeletons for assisted locomotion
[J].
Bio-inspired, intelligent flexible sensing skin for multifunctional flying perception
[J].
Woven type smart soft composite for soft morphing car spoiler
[J].
Highly-aligned all-fiber actuator with asymmetric photothermal-humidity response and autonomous perceptivity
[J].
Stimuli-responsive fiber/fabric actuators for intelligent soft robots: from current progress to future opportuni-ties
[J].
Soft fiber/textile actuators: from design strategies to diverse applications
[J].
Zero-waste emission design of sustainable and programmable actuators
[J].
Functional fibers and fabrics for soft robotics, wearables, and human-robot interface
[J].
Torsional displacement of piezoelectric fiber actuators with helical electrodes
[J].
Electrostrictive microelectromechanical fibres and textiles
[J].
Ferroelectric ceramics: history and technology
[J].
Ferroelectric polymers
[J].Piezoelectricity and pyroelectricity, traditionally encountered in certain single crystals and ceramics, have now also been documented in a number of polymers. Recently, one such polymer-poly(vinylidene fluoride)-and some of its copolymers have been shown to be ferroelectric as well. The extraordinary molecular and supermolecular structural requirements for ferroelectric behavior in polymers are discussed in detail, with particular emphasis on poly(vinylidene fluoride). Piezoelectric, pyroelectric, and ferroelectric properties are also briefly reviewed, as are some promising applications of such polymers.
Emerging innovations in electrically powered artificial muscle fibers
[J].
Artificial muscles: mechanisms, applications, and challen-ges
[J].
Intrinsically anisotropic dielectric elastomer fiber actuators
[J].
High-twist-pervaded electrochemical yarn muscles with ultralarge and fast contractile actuations
[J].
Artificial muscles based on coiled conductive polymer yarns
[J].
Sheath-run artificial muscles
[J].
DOI:10.1126/science.aaw2403
PMID:31296765
[本文引用: 2]

Although guest-filled carbon nanotube yarns provide record performance as torsional and tensile artificial muscles, they are expensive, and only part of the muscle effectively contributes to actuation. We describe a muscle type that provides higher performance, in which the guest that drives actuation is a sheath on a twisted or coiled core that can be an inexpensive yarn. This change from guest-filled to sheath-run artificial muscles increases the maximum work capacity by factors of 1.70 to 2.15 for tensile muscles driven electrothermally or by vapor absorption. A sheath-run electrochemical muscle generates 1.98 watts per gram of average contractile power-40 times that for human muscle and 9.0 times that of the highest power alternative electrochemical muscle. Theory predicts the observed performance advantages of sheath-run muscles.Copyright © 2019 The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. No claim to original U.S. Government Works.
Large-stroke electrochemical carbon nanotube/graphene hybrid yarn muscles
[J].
High-performance carbon nanotube/polyaniline artificial yarn muscles working in biocompatible environments
[J].
Electromechanical actuator ribbons driven by electrically conducting spring-like fibers
[J].
DOI:10.1002/adma.201501731
[本文引用: 1]
Chen, Peining; He, Sisi; Xu, Yifan; Sun, Xuemei; Peng, Huisheng Fudan Univ, State Key Lab Mol Engn Polymers, Collaborat Innovat Ctr Polymers & Polymer Composi, Dept Macromol Sci, Shanghai 200438, Peoples R China. Chen, Peining; He, Sisi; Xu, Yifan; Sun, Xuemei; Peng, Huisheng Fudan Univ, Adv Mat Lab, Shanghai 200438, Peoples R China.
Biomimetic artificial neuromuscular fiber bundles with built-in adaptive feedback
[J].
Pretension-free and self-recoverable coiled artificial muscle fibers with powerful cyclic work capability
[J].
织物增强复合材料的电热驱动形状记忆回复行为
[J].
Electrically and thermally driven shape memory recovery behavior of fabric-reinforced composites
[J].
形状记忆合金复合纱线及其面料驱动性能
[J].
Shape memory alloy composite yarn and its fabric driving performance
[J].
Fast large-stroke sheath-driven electrothermal artificial muscles with high power densities
[J].
Knittable electrochemical yarn muscle for morphing textiles
[J].
Bioinspired H-bonding connected gradient nanostructure actuators based on cellulose nanofibrils and graph-ene
[J].
Ultrastrong and highly sensitive fiber microactuators constructed by force-reeled silks
[J].
Spider dragline silk as torsional actuator driven by humidity
[J].
Magnetically actuated fiber-based soft robots
[J].
Nacre-inspired moisture-responsive graphene actuators with robustness and self-healing properties
[J].
DOI:10.1039/c9nr06579b
PMID:31641724
[本文引用: 1]
Moisture-responsive actuators based on graphene oxide (GO) have attracted intensive research interest in recent years. However, current GO actuators suffer from low mechanical strength. Inspired by the robustness of nacre's structure, moisture-responsive actuators with high mechanical strength and self-healing properties were successfully developed based on GO and cellulose fiber (CF) hybrids. The hybrid paper demonstrated significantly improved tensile strength, ∼20 times higher than that of pure GO paper, and self-healing properties. A broken paper can be well cured under moist conditions, and the mechanical properties of the self-healed hybrid paper can still maintain similar tensile strength to the pristine one. After controllable ultraviolet light photoreduction treatment, a hybrid paper with a photoreduction gradient along the normal direction was prepared, which can act as a moisture-responsive actuator. A maximum bending curvature of ∼1.48 cm can be achieved under high relative humidity (RH = 97%). As a proof-of-concept, a butterfly-like actuator that can deform itself with moisture actuation was demonstrated. Our approach may pave a new way for designing robust and self-healable graphene actuators.
Mussel-inspired chemistry: a promising strategy for natural polysaccharides in biomedical applications
[J].
Natural alginate fiber-based actuator driven by water or moisture for energy harvesting and smart controller applications
[J].
Moisture-driven actuators
[J].
Novel hydrogel actuator inspired by reversible mussel adhesive protein chemis-try
[J].
Mechanically and electronically robust transparent organohydrogel fibers
[J].
Artificial spider silk from ion-doped and twisted core-sheath hydrogel fibres
[J].
Biomimetic mineralized organic-inorganic hybrid macrofiber with spider silk-like supertoughness
[J].
Chemical tuning of fibers drawn from extensible hyaluronic acid networks
[J].
DOI:10.1021/jacs.0c09691
PMID:33141568
[本文引用: 1]
Polymer fibers with specific chemical and mechanical properties are key components of many biomaterials used for regenerative medicine and drug delivery. Here, we develop a bioinspired, low-energy process to produce mechanically tunable biopolymer fibers drawn from aqueous solutions. Hyaluronic acid (HA) forms dynamic cross-links with branched polyethylene glycol polymers end-functionalized with boronic acids of varied structure to produce extensible polymer networks. This dynamic fiber precursor (DFP) is directly drawn by pultrusion into HA fibers that display high aspect ratios, ranging from 4 to 20 μm in diameter and up to ∼10 m in length. Dynamic rheology measurements of the DFP and tensile testing of the resulting fibers reveal design considerations to tune the propensity for fiber formation and fiber mechanical properties, including the effect of polymer structure and concentration on elastic modulus, tensile strength, and ultimate strain. The materials' humidity-responsive contractile behavior, a unique property of spider silks rarely observed in synthetic materials, highlights possibilities for further biomimetic and stimulus-responsive fiber applications. This work demonstrates that chemical modification of dynamic interactions can be used to tune the mechanical properties of pultrusion-based fibers and their precursors.
Artificial spider silk with buckled sheath by nano-pulley combing
[J].
Establishing superfine nanofibrils for robust polyelectrolyte artificial spider silk and powerful artificial muscles
[J].
High-performance fasciated yarn artificial muscles prepared by hierarchical structuring and sheath-core coupling for versatile textile actuators
[J].
Plant-like tropisms in artificial muscles
[J].
Breathable metal-organic framework enhanced humidity-responsive nanofiber actuator with autonomous triboelectric perceptivity
[J].
DOI:10.1021/acsnano.3c04022
PMID:37668183
[本文引用: 1]
Autonomous object manipulation and perception with environmental factor-triggered and self-powered actuation is one of the most attractive directions for developing next-generation soft robotics with a smart human-machine-environment interface. Humidity, as a sustainable energy source ubiquitous in the surrounding environment, can be used for triggering smart grippers. In this work, it is proposed that by contacts between the gripper and objects upon humidity-induced actuation, real-time distinguishable triboelectric signals can be generated to realize the humidity-driven object manipulation and identification. Herein, a thermo-modified electrospun polyvinylpyrrolidone/poly(acrylic acid)/MIL-88A (T-PPM) nanofibrous film with micro-to-nano cross-scale porosity is developed, and a bilayer humidity-responsive actuator (T-HRA) was designed, mimicking the tamariskoid spikemoss to enhance the humidity-driven actuation. The breathing effect of MIL-88A and hierarchical porous structure of the T-PPM facilitate moisture diffusion and offer huge actuation (2.41 cm) with a fast response (0.084 cm s). For autonomous object manipulation perception, T-PPM was verified as a tribo-positive material located between paper and silk. Accordingly, the T-HRA was demonstrated as a smart soft gripper that generates a different electric signal upon contact with objects of different material. This work proposes a concept of soft robots that are interactive with the environment for both autonomous object manipulation and information acquisition.
Life-like motion driven by artificial molecular machines
[J].
DOI:10.1038/s41570-019-0122-2
[本文引用: 1]
Essentially, all motion in living organisms emerges from the collective action of biological molecular machines transforming chemical energy, originally harvested from light, into ordered activity. As a man-made counterpart to nature's biomolecular machines, chemists have created artificial molecular machines that display controlled and even directional motion in response to light. However, to be of practical value, the motion of these light-fuelled molecular machines will have to be coupled to the rest of the world. Inspired by the complex functional movement seen in the plant and animal world, chemists have undertaken the challenge to harness molecular motion and, so, they have set artificial molecular motors and switches to work and perform useful mechanical action at the macroscopic level. Here, we review these recent developments. We show how modern research has embraced the full complexity of the molecular world by aiming at the design of autonomous, and sometimes adaptive, molecular systems that work continuously under the effect of illumination. We report evidence that molecular motion can be engineered into highly sophisticated movements and that, from a fundamental point of view, continuous movement can only emerge when man-made molecules cooperate, in space and time. Eventually, unravelling the rules of molecular motion will support the creation of molecular materials that produce work continuously under a constant input of energy.
Microfiber actuators with hot-pressing programmable mechano photothermal responses for electromagnetic perception
[J].
Electrospun liquid crystal elastomer microfiber actuator
[J].
A biomimetic conductive tendril for ultrastretchable and integratable electronics, muscles, and sensors
[J].
DOI:10.1021/acsnano.8b01372
PMID:29584398
[本文引用: 1]
Adaptive tendril coiling of climbing plants has long inspired the artificial soft microsystem for actuation and morphing. The current bionic research efforts on tendril coiling focus on either the preparation of materials with the coiling geometry or the design of self-shaping materials. However, the realization of two key functional features of the tendril, the spring-like buffering connection and the axial contraction, remains elusive. Herein, we devise a conductive tendril by fusing conductive yarns into tendril configuration, bypassing the prevailing conductivity constraints and mechanical limitations. The conductive tendril not only inherits an electrophysiology buffering mechanics with exceptional conductance retention ability against extreme stretching but also exhibits excellent contractive actuation performance. The integrative design of the ultraelastic conductive tendril shows a combination of compliant mobility, actuation, and sensory capabilities. Such smart biomimetic material holds great prospects in the fields of ultrastretchable electronics, artificial muscles, and wearable bioelectronic therapeutics.
Wearable sunlight-triggered bimorph textile actua-tors
[J].
Self-powered multifunctional sensing based on super-elastic fibers by soluble-core thermal drawing
[J].
Superelastic multimaterial electronic and photonic fibers and devices via thermal drawing
[J].
Strain-programmable fiber-based artificial muscle
[J].
DOI:10.1126/science.aaw2502
PMID:31296764
[本文引用: 1]
Artificial muscles may accelerate the development of robotics, haptics, and prosthetics. Although advances in polymer-based actuators have delivered unprecedented strengths, producing these devices at scale with tunable dimensions remains a challenge. We applied a high-throughput iterative fiber-drawing technique to create strain-programmable artificial muscles with dimensions spanning three orders of magnitude. These fiber-based actuators are thermally and optically controllable, can lift more than 650 times their own weight, and withstand strains of >1000%. Integration of conductive nanowire meshes within these fiber-based muscles offers piezoresistive strain feedback and demonstrates long-term resilience across >10 deformation cycles. The scalable dimensions of these fiber-based actuators and their strength and responsiveness may extend their impact from engineering fields to biomedical applications.Copyright © 2019 The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. No claim to original U.S. Government Works.
Asymmetric nanofiber photothermal interactive electronic skin with triboelectric autonomous thermal percep-tivity
[J].
Multi-stimuli-responsive programmable biomimetic actu-ator
[J].
Self-healable multifunctional fibers via thermal drawing
[J].
Miniature coiled artificial muscle for wireless soft medical devices
[J].
Printing ferromagnetic domains for untethered fast-transforming soft materials
[J].
Recent advances in ionic polymer-metal composite actuators and their modeling and applications
[J].
Designing fiber-reinforced soft actuators for planar curvilinear shape matching
[J].
DOI:10.1089/soro.2018.0169
PMID:31566502
[本文引用: 1]
Fiber-reinforced soft pneumatic actuators can generate a wide variety of deformation behavior, making them popular in the field of soft robotics. Designing an actuator to meet a specified deformed shape is an important step toward the design of soft robots. We present a two-step methodology to design an actuator that matches a given planar curve on pressurization. In the first step, the curve is divided into a series of constant curvature (CC) segments that best approximate its shape. The second step involves designing a bending actuator by determining its fiber orientations for each CC segment. Further, this two-step method is extended to match two curves: a final deformed curve and an intermediate curve at a lower actuation pressure. On combining all the CC segments, the resulting actuator lies along a straight line unpressurized, and on pressurization deforms to trace the desired final curve through a preset intermediate curve. To demonstrate the method, we show different examples: an omega curve for an inchworm robot, an acronym SoRo for the Soft Robotics Journal, and a two-stage bending actuator.
Mechanical programming of soft actuators by varying fiber angle
[J].
3D knitting for pneumatic soft robotics
[J].
Self-sensing coaxial muscle fibers with bi-lengthwise actuation
[J].
DOI:10.1039/d1mh00743b
PMID:34870310
[本文引用: 1]
Artificial muscle fibers as a promising biomimetic actuator are needed for such applications as smart soft robots, muscle function restoration, and physical augmentation. Currently developed artificial muscle fibers have shown attractive performance in contractile and torsional actuations. However, the contractile muscle fibers do not have the capability of stimulus-responsive elongation, and real-time identifying their contractile position by themselves is still challenging. We report herein the preparation of a TiCT MXene/single walled carbon-nanotubes (SWCNTs)-coated carbon nanotube (CNT)@polydimethylsiloxane (PDMS) coaxial muscle fiber that integrates the important features of self-position sensing and bi-lengthwise actuation. The bi-lengthwise actuation is realized by utilizing the large expansion coefficient difference of PDMS in response to solvent and heat, which results in ∼5% maximum elongation by n-heptane adsorption and ∼19% maximum contraction by electric heating under the optimal conditions. Meanwhile, due to the piezoresistive effect of the MXene/SWCNTs layer, the resistance change of this coating layer is almost linearly dependent on the contraction of the coaxial muscle fiber, providing a function of real-time self-position sensing. Furthermore, an application of using a bundle of these multifunctional coaxial muscle fibers for a bionic arm has been demonstrated, which provides new insights into the design of integrated intelligent artificial muscles with synergistic multiple functions.
Biospinning of hierarchical fibers for a self-sensing actuator
[J].
Artificial neuromuscular fibers by multilayered coaxial integration with dynamic adaption
[J].
The integration of sensing and actuating based on a simple design fiber actuator towards intelligent soft robots
[J].
Robust all-fabric e-skin with high-temperature and corrosion tolerance for self-powered tactile sensing
[J].
Multifunctional metallic backbones for origami robotics with strain sensing and wireless communication capabilities
[J].

 京公网安备11010502044800号
京公网安备11010502044800号{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}