纺织学报 ›› 2023, Vol. 44 ›› Issue (02): 128-134.doi: 10.13475/j.fzxb.20220804107
吴靖, 韩晨晨( ), 高卫东
), 高卫东
WU Jing, HAN Chenchen(), GAO Weidong
摘要:
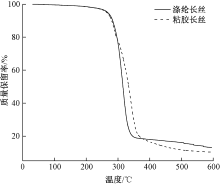
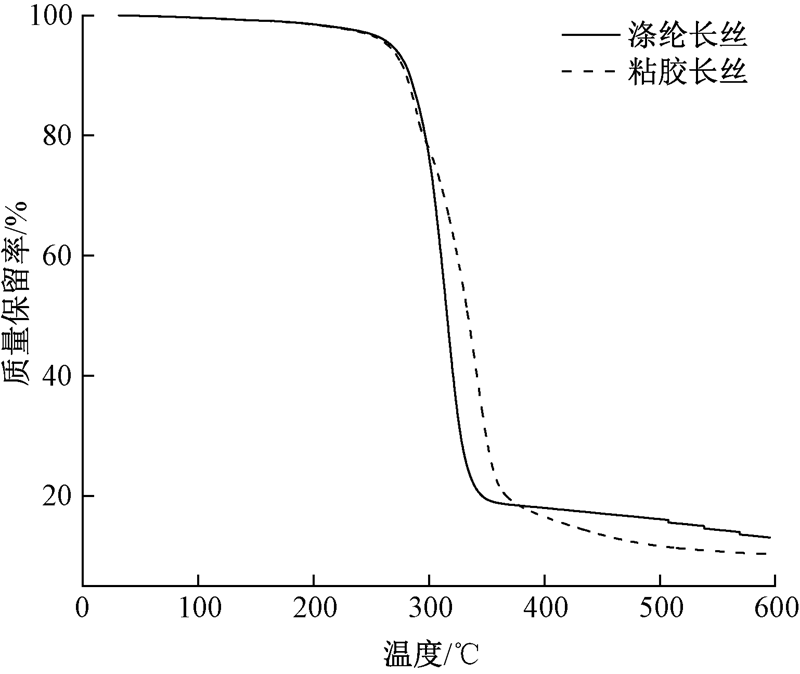
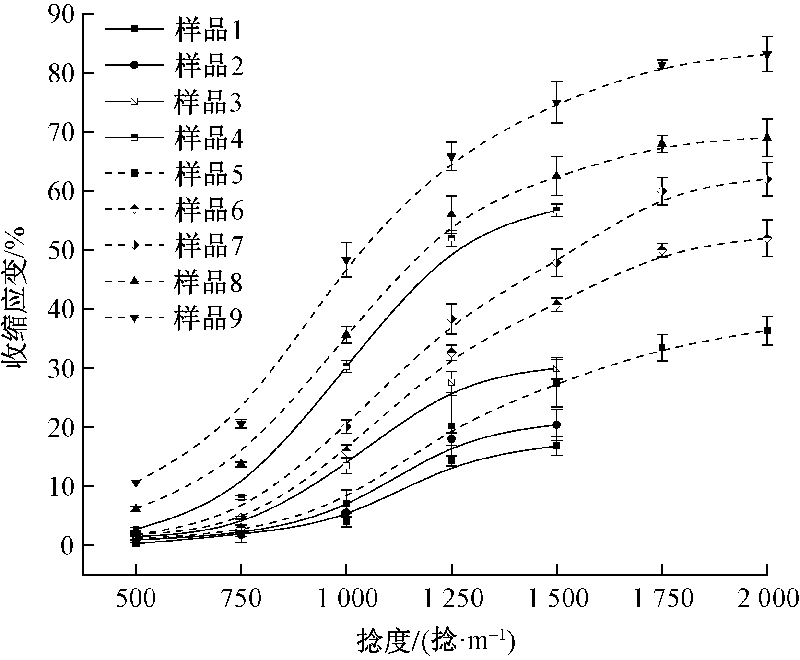
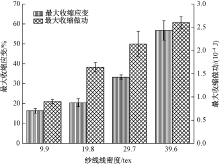
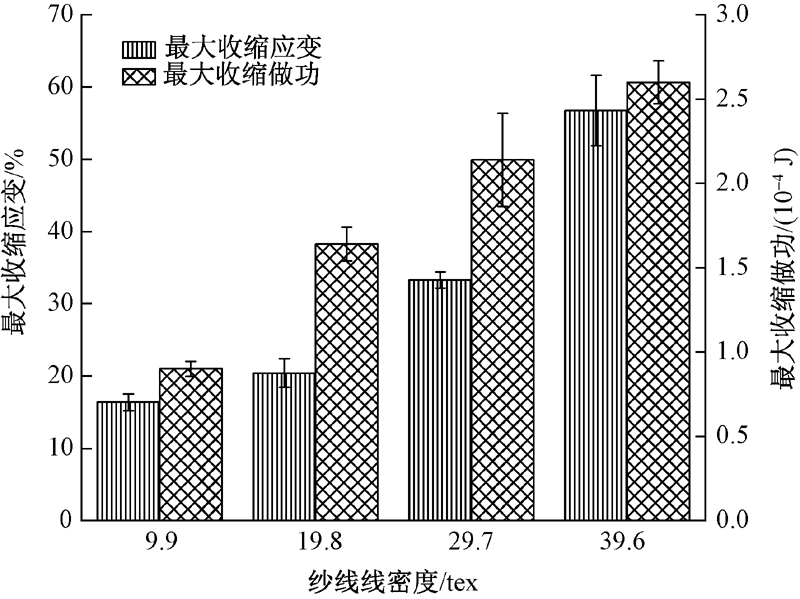
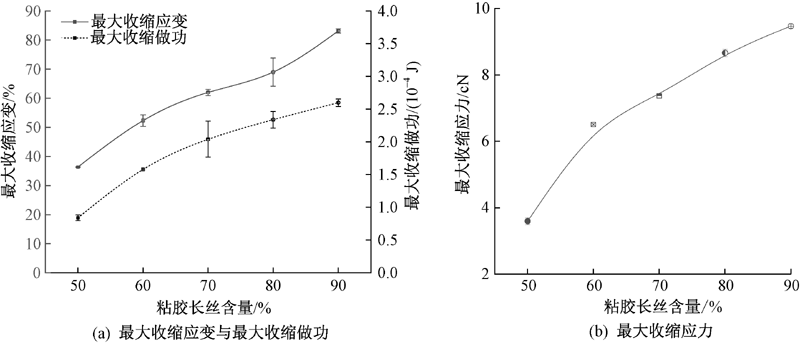
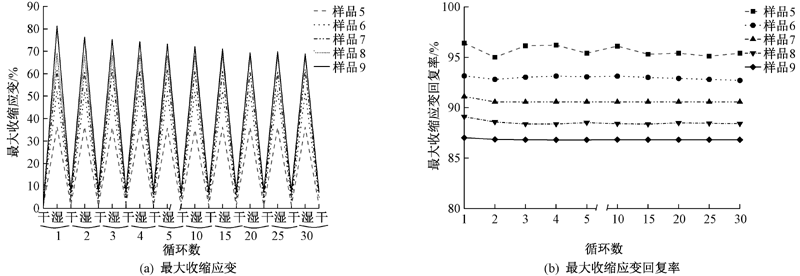
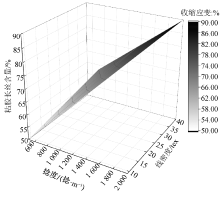
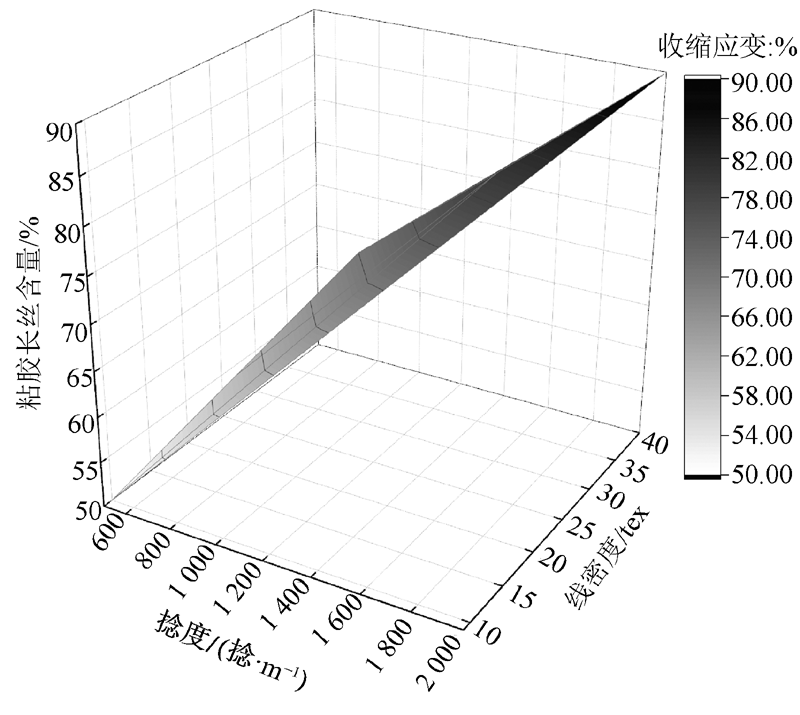
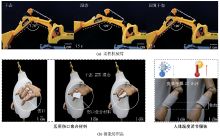
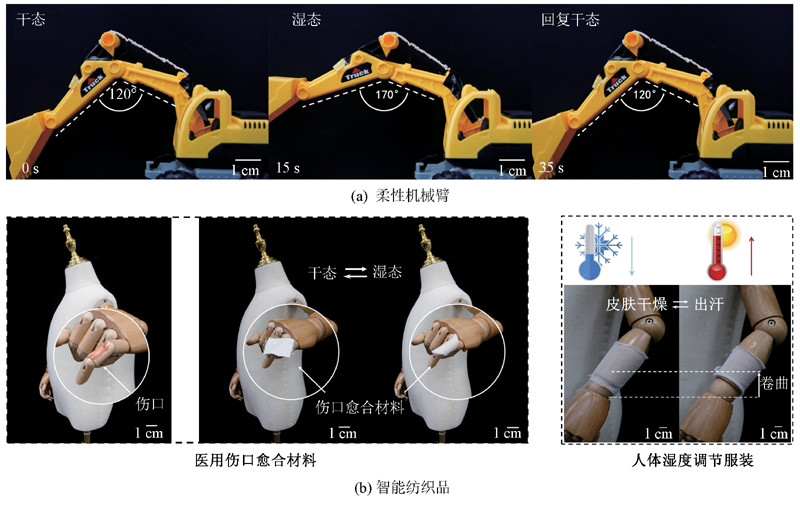
针对纤维基驱动器结构稳定性较低、制备工艺复杂、难以实现产业化应用等问题,采用亲水性粘胶长丝与低熔点涤纶长丝,通过并线、倍捻、热定形的方法制备纱线基驱动器,利用在外界湿刺激条件下2种材料的非对称响应实现驱动功能。对该纱线基驱动器结构进行测试与表征,分析湿刺激下粘胶长丝与涤纶长丝协同响应驱动性能和循环回复效应的影响因素。结果表明:该纱线基驱动器表面为粘胶与涤纶长丝束呈多层级交替排布的类骨骼肌结构;在一定范围内,驱动器的驱动性能随着纱线捻度、线密度与粘胶长丝含量的增加而增大,单次循环内驱动器最大收缩应变可达83.15%,连续30次循环内最大收缩应变回复率可达90%以上,展现出优异的结构稳定性以及强大灵敏的响应驱动性和循环回复效应,在柔性机械臂、智能纺织品等开发领域具有广阔的应用前景。
中图分类号:
| [1] |
LIU Zhongsheng, ZHANG Rui, XIAO Yicheng, et al. Somatosensitive film soft crawling robots driven by artificial muscle for load carrying and multi-terrain locomotion[J]. Materials Horizons, 2021. DOI: 10.1039/d1mh00457c.
doi: 10.1039/d1mh00457c |
| [2] |
JIEFENG S, TIGHE B, YINGXIANG L, et al. Twisted-and-coiled actuators with free strokes enable soft robots with programmable motions[J]. Soft Robotics, 2021, 8(2):213-225.
doi: 10.1089/soro.2019.0175 |
| [3] | 王勇, 曹吉强, 孙安彤, 等. 湿驱动仿生人工肌肉纤维材料的研究进展[J]. 棉纺织技术, 2022, 50(3):79-84. |
| WANG Yong, CAO Jiqiang, SUN Antong, et al. Research progress of wet-driven bionic artificial muscle fiber materials[J]. Cotton Textile Technology, 2022, 50(3): 79-84. | |
| [4] |
LI Y, MIAO M H. Water-responsive artificial muscles from commercial viscose fibers without chemical treatment[J]. Materials Research Letters, 2020, 8(6):232-238.
doi: 10.1080/21663831.2020.1743787 |
| [5] |
ALRAMMOUZ R, PODLECKI J, VENA A, et al. Highly porous and flexible capacitive humidity sensor based on self-assembled graphene oxide sheets on a paper substrate[J]. Sensors and Actuators B: Chemical, 2019. DOI:10.1016/j.snb.2019.126892.
doi: 10.1016/j.snb.2019.126892 |
| [6] |
FOROUGHI J, SPINKS G M, WALLACE G G, et al. Torsional carbon nanotube artificial muscles[J]. Science, 2011, 334(6055):494-497.
doi: 10.1126/science.1211220 pmid: 21998253 |
| [7] |
KIM S H, KWON C H, PARK K, et al. Bio-inspired, moisture-powered hybrid carbon nanotube yarn muscles[J]. Scientific Reports, 2016. DOI:10.1038/srep23016.
doi: 10.1038/srep23016 |
| [8] |
WANG Y, MIAO M H. Helical shape linen artificial muscles responsive to water[J]. Smart Materials and Structures, 2021. DOI:10.1088/1361-665X/ac03c5.
doi: 10.1088/1361-665X/ac03c5 |
| [9] |
CHEN P N, XU Y F, HE S S, et al. Hierarchically arranged helical fibre actuators driven by solvents and vapours[J]. Nature Nanotechnology, 2015. DOI:10.1038/nnano.2015.198.
doi: 10.1038/nnano.2015.198 |
| [10] |
HAN B, ZHANG Y L, ZHU L, et al. Plasmonic-assisted graphene oxide artificial muscles[J]. Adv Mater, 2019. DOI: 10.1002/adma.201806386.
doi: 10.1002/adma.201806386 |
| [11] | PENG Y, SUN F, XIAO C, et al. Hierarchically structured and scalable artificial muscles for smart textiles[J]. ACS Applied Materials & Interfaces, 2021, 13(45):54386-54395. |
| [12] |
MU J, ANDRADE M J D, FANG S, et al. Sheath-run artificial muscles[J]. Science, 2019, 365(6449): 150-155.
doi: 10.1126/science.aaw2403 pmid: 31296765 |
| [13] | 张沁苇. 螺旋卷绕型纤维基人工肌肉的制备与致动特性研究[D]. 武汉: 华中科技大学, 2020:36-39. |
| ZHANG Qinwei. Preparation and actuation characteristics of spiral wound fiber-based artificial muscles[D]. Wuhan: Huazhong University of Science and Technology, 2020:36-39. |
| [1] | 彭阳阳, 盛楠, 孙丰鑫. 纤维基湿敏柔性驱动器的跨尺度构建及其性能[J]. 纺织学报, 2023, 44(02): 90-95. |
| [2] | 牛丽, 刘青, 陈超余, 蒋高明, 马丕波. 仿生鳞片针织结构自供能传感织物的制备及其性能[J]. 纺织学报, 2023, 44(02): 135-142. |
| [3] | 蒲海红, 贺芃鑫, 宋柏青, 赵丁莹, 李欣峰, 张天一, 马建华. 纤维素/碳纳米管复合纤维的制备及其功能化应用[J]. 纺织学报, 2023, 44(01): 79-86. |
| [4] | 肖渊, 李倩, 张威, 胡汉春, 郭鑫雷. 微喷印原电池置换成型织物基柔性导电线路的影响因素研究[J]. 纺织学报, 2022, 43(10): 89-96. |
| [5] | 杨梦凡, 王潮霞, 殷允杰, 邱华. 棉织物的螺吡喃微胶囊印花及其光致变色性能[J]. 纺织学报, 2022, 43(09): 137-142. |
| [6] | 李瑞凯, 李瑞昌, 朱琳, 刘向阳. 基于石墨烯织物电极的七导联心电监测系统[J]. 纺织学报, 2022, 43(07): 149-154. |
| [7] | 王成成, 龚筱丹, 王振, 马群旺, 张丽平, 付少海. 高灵敏温感变色微胶囊的制备及其在智能纺织品上的应用[J]. 纺织学报, 2022, 43(05): 38-42. |
| [8] | 李加双, 张丽平, 付少海. 双稳态电致变色离子凝胶的制备及其在织物上的应用[J]. 纺织学报, 2022, 43(02): 24-29. |
| [9] | 李冬冬, 张成俊, 左小艳, 张弛, 朱里, 刘雅昆. 密绕线圈阵列结构对悬浮织针驱动性能的影响[J]. 纺织学报, 2021, 42(09): 156-162. |
| [10] | 林文君, 缪旭红. 光导纤维在发光织物上的应用研究进展[J]. 纺织学报, 2021, 42(07): 169-174. |
| [11] | 徐晋, 杨鹏程, 肖渊, 胥光申. 织物表面导电线路喷射打印中微滴关键参数的视觉测量[J]. 纺织学报, 2021, 42(07): 137-143. |
| [12] | 王航, 王冰心, 宁新, 曲丽君, 田明伟. 喷墨打印导电墨水及其智能电子纺织品研究进展[J]. 纺织学报, 2021, 42(06): 189-197. |
| [13] | 梁家豪, 巫莹柱, 刘海东, 黄美林, 蔡瑞燕, 周俊俭, 谢权沛. 表层静电植入与贴伏石墨烯的湿敏聚氨酯纤维制备及其性能[J]. 纺织学报, 2021, 42(06): 63-70. |
| [14] | 肖渊, 李红英, 李倩, 张威, 杨鹏程. 棉织物/聚二甲基硅氧烷复合介电层柔性压力传感器制备[J]. 纺织学报, 2021, 42(05): 79-83. |
| [15] | 姜兆辉, 李永贵, 杨自涛, 郭增革, 张战旗, 齐元章, 金剑. 聚合物基石墨烯复合纤维及其纺织品研究进展[J]. 纺织学报, 2021, 42(03): 175-180. |
|
 京公网安备11010502044800号
京公网安备11010502044800号