纺织学报 ›› 2025, Vol. 46 ›› Issue (07): 227-235.doi: 10.13475/j.fzxb.20240803201
任志墨1,2, 张文昌1,2, 李贞逸1,2, 叶贺3, 杨春柳1,2, 张倩1,2( )
)
REN Zhimo1,2, ZHANG Wenchang1,2, LI Zhenyi1,2, YE He3, YANG Chunliu1,2, ZHANG Qian1,2()
摘要:
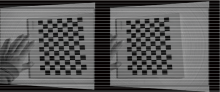
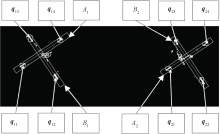
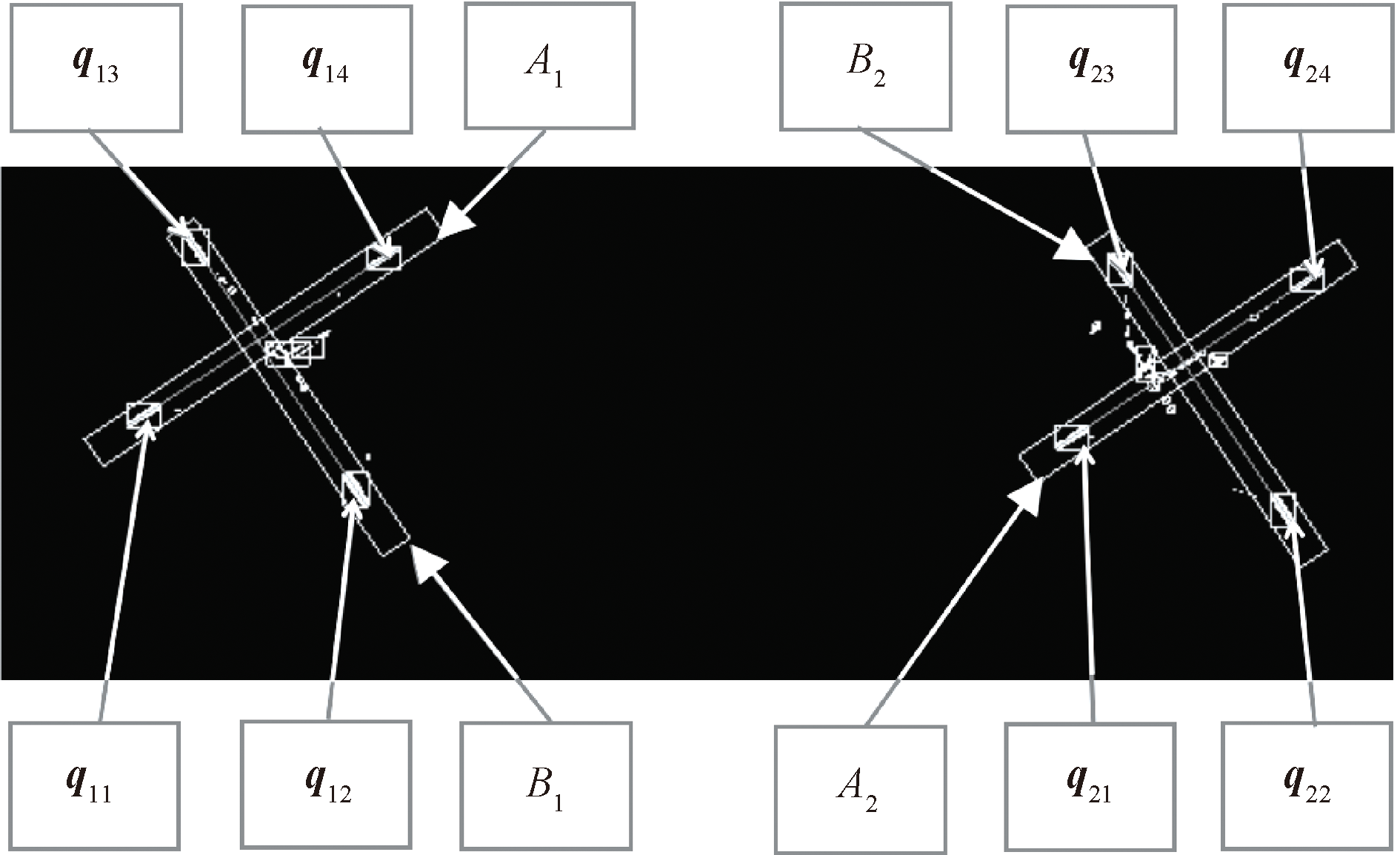
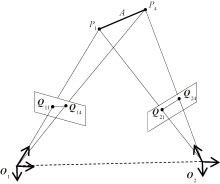
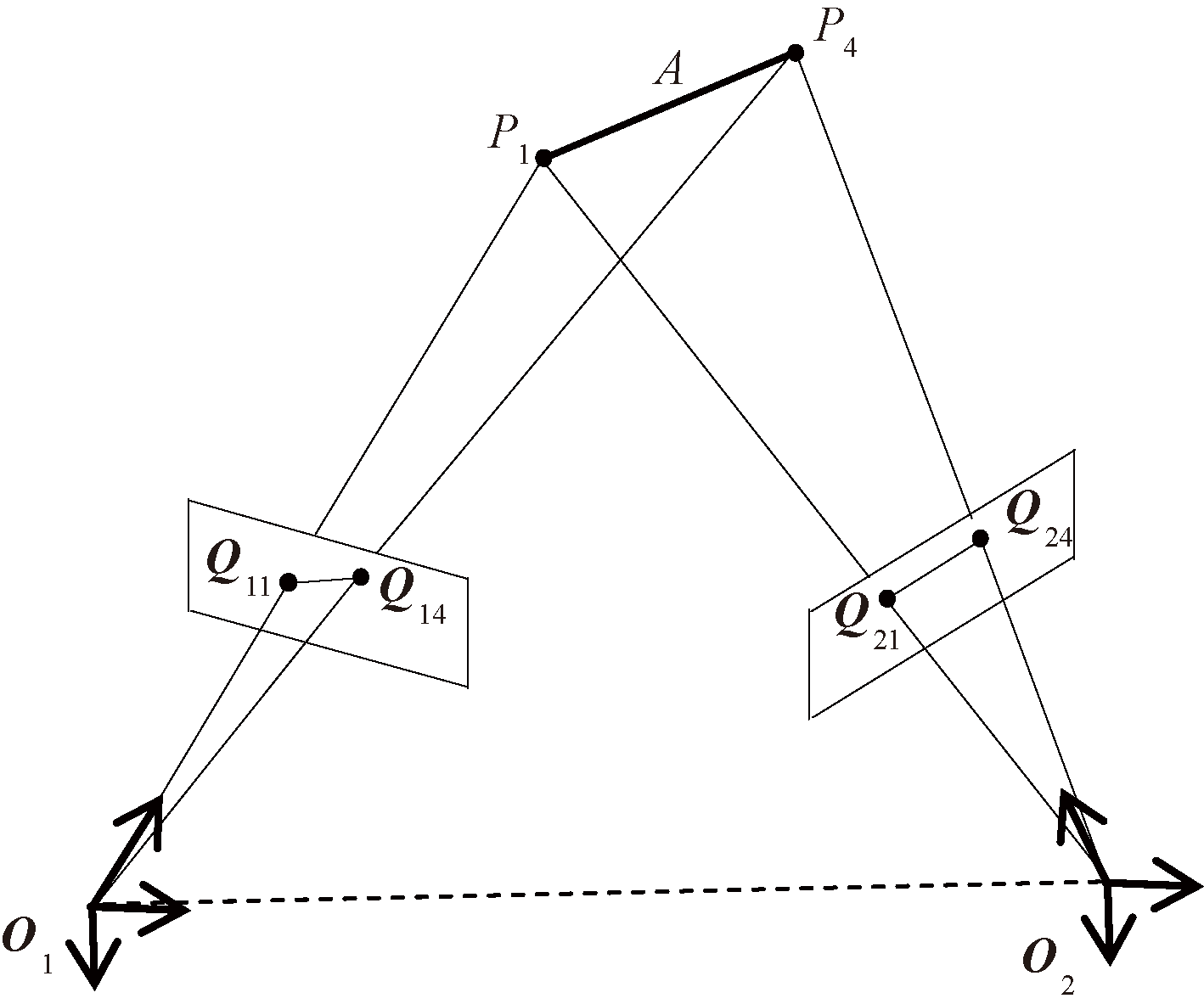
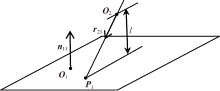
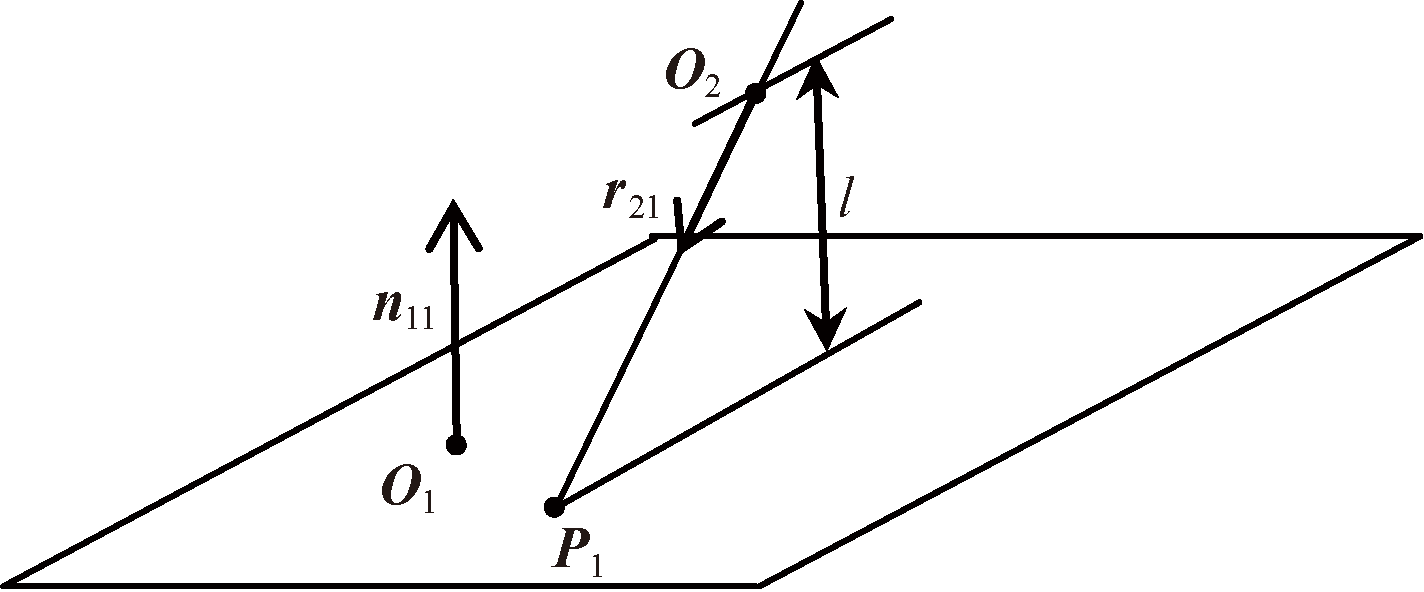
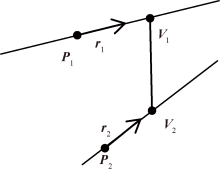
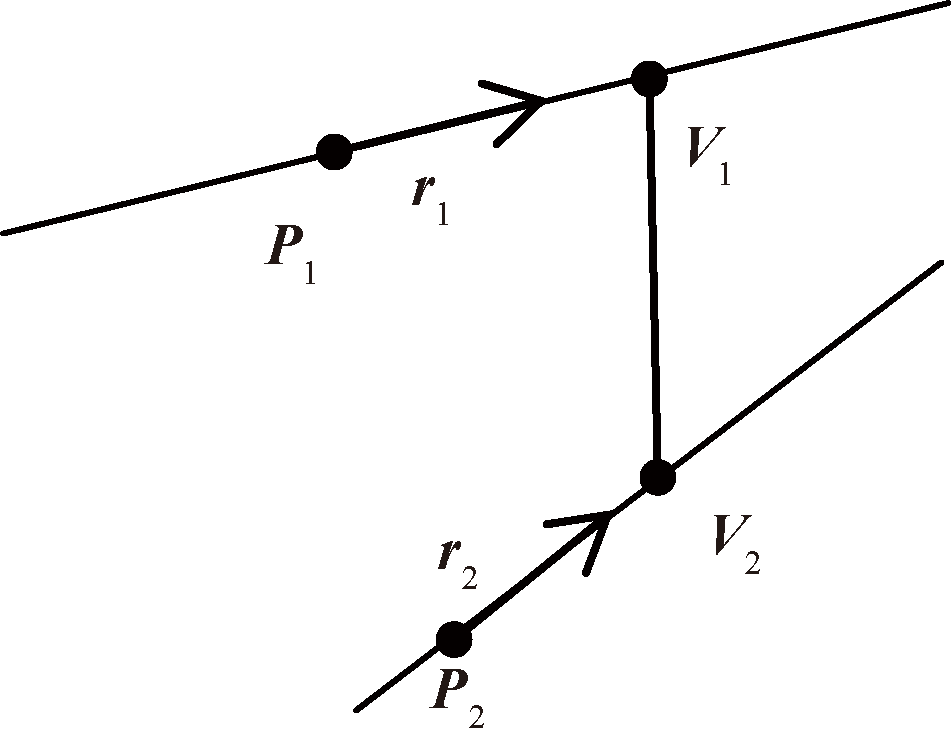
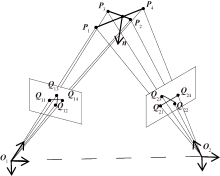
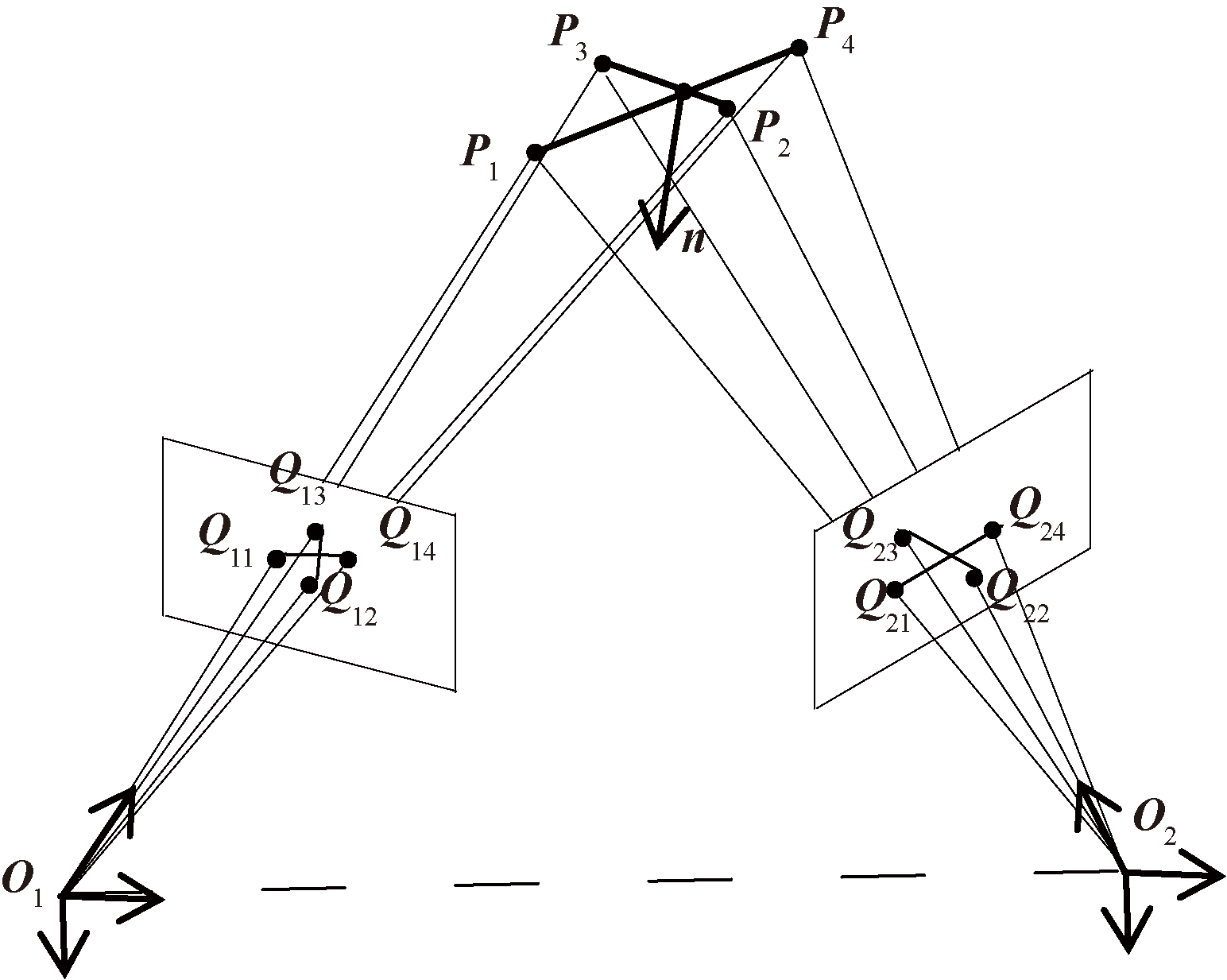
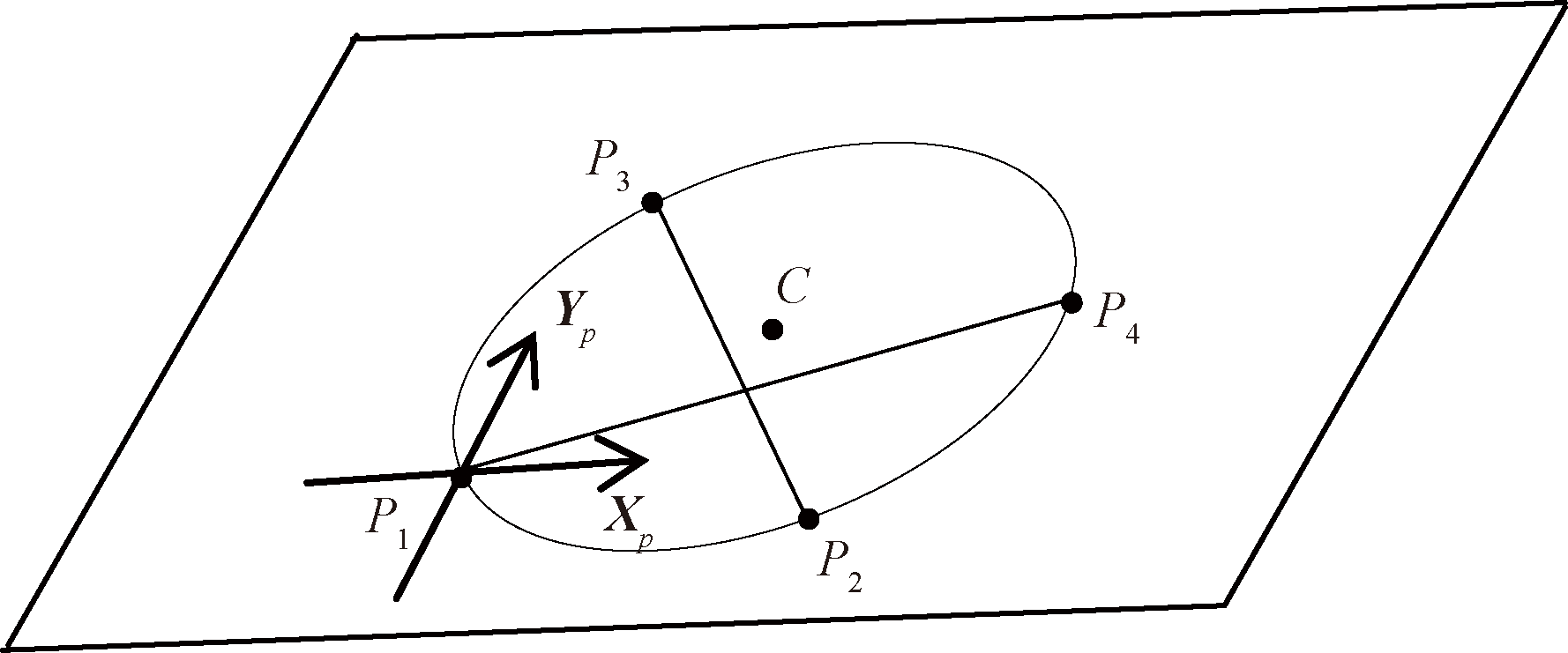
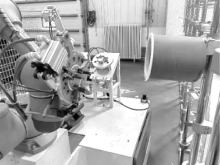
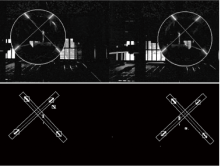
为实现纺织行业生产中圆柱件空间位置与姿态的高精度定位,提出基于双目视觉与十字结构光的三维视觉定位方法。首先通过双目视觉标定确定左右相机的内参、外参及位置关系;其次针对十字结构光的成像特征提出基于空间直线的立体匹配算法完成三维重建工作;进而利用结构光与工件边缘交点空间坐标拟合圆柱件端平面及端面圆,实现圆柱件的空间位姿定位;最后根据该方法进行三维抓取实验及误差分析。结果表明:该方法能够准确引导机器人完成退绕盘的抓取工作,对圆柱件端平面定位误差小于0.2 mm,端面圆边缘定位误差小于1.0 mm,其精度效果能够满足工业生产需求,为机器视觉定位技术在纺织行业生产中的应用提供参考。
中图分类号:
| [1] | 郑小虎, 刘正好, 陈峰, 等. 纺织工业智能发展现状与展望[J]. 纺织学报, 2023, 44(8):205-216. |
| ZHENG Xiaohu, LIU Zhenghao, CHEN Feng, et al. Current status and prospect of intelligent develop-ment in textile industry[J]. Journal of Textile Research, 2023, 44(8):205-216. | |
| [2] | 王文胜, 李天剑, 冉宇辰, 等. 筒子纱纱笼纱杆的定位检测方法[J]. 纺织学报, 2020, 41(3):160-167. |
| WANG Wensheng, LI Tianjian, RAN Yuchen, et al. Method for position detection of cheese yarn rod[J]. Journal of Textile Research, 2020, 41(3): 160-167. | |
| [3] |
史伟民, 韩思捷, 屠佳佳, 等. 基于机器视觉的空纱筒口定位方法[J]. 纺织学报, 2023, 44(11):105-112.
doi: 10.13475/j.fzxb.20220605501 |
|
SHI Weimin, HAN Sijie, TU Jiajia, et al. Empty yarn bobbin positioning method based on machine vision[J]. Journal of Textile Research, 2023, 44(11): 105-112.
doi: 10.13475/j.fzxb.20220605501 |
|
| [4] | 倪奕棋, 管声启, 管宇灿, 等. 基于改进的SSD深度学习算法的双目视觉纱筒识别定位[J]. 纺织高校基础科学学报, 2021, 34(2):59-66. |
| NI Yiqi, GUAN Shengqi, GUAN Yucan, et al. Binocular vision bobbin identification and positioning based on improved SSD deep learning algorithm[J]. Basic Sciences Journal of Textile Universities, 2021, 34(2):59-66. | |
| [5] | 毛慧敏, 屠佳佳, 孙磊, 等. 适应多类型纱筒的换筒末端执行器关键技术[J]. 纺织学报, 2024, 45(6):193-200. |
| MAO Huimin, TU Jiajia, SUN Lei, et al. Key technology research of bobbin change actuator suitable for multiple bobbin types[J]. Journal of Textile Research, 2024, 45(6):193-200. | |
| [6] | ZHANG Z. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334. |
| [7] | 刘建春, 高永康, 陈勇忠. 双目视觉引导的异构件定位抓取系统[J]. 机械设计与制造, 2022(11):285-288, 295. |
| LIU Jianchun, GAO Yongkang, CHEN Yongzhong. Research on binocular vision guided localization and grasping system of heterogeneous parts[J]. Machinery Design & Manufacture, 2022(11):285-288,295. | |
| [8] | 杨记鑫, 胡伟霞, 赵杰. 基于双目视觉的标定和立体匹配的研究[J]. 电子设计工程, 2022, 30(13):50-53,58. |
| YANG Jixing, HU Weixia, ZHAO Jie. Research on calibration and stereo matching based on binocular vision[J]. Electronic Design Engineering, 2022, 30(13):50-53,58. | |
| [9] | 贺玉泉, 张勇杰, 谢光奇, 等. 基于双目线阵CCD的目标平面定位方法[J]. 激光与光电子学进展, 2022, 59(22): 96-203. |
| HE Yuquan, ZHANG Yongjie, XIE Guangqi, et al. Target plane positioning method based on bi-linear charge coupled device[J]. Laser & Optoelectronics Progress, 2022, 59(22):196-203. | |
| [10] | LIN C H, POWELL R A, JIANG L, et al. Real-time depth measurement for micro-holes drilled by lasers[J]. Measurement Science & Technology, 2010, 21(2):1-6. |
| [11] |
张冰洁, 蔡来良, 王鑫, 等. 基于数量场梯度的露天矿点云台阶线自动提取算法[J]. 测绘通报, 2023(7):63-68.
doi: 10.13474/j.cnki.11-2246.2023.0202 |
|
ZHANG Bingjie, CAI Lailiang, WANG Xin, et al. Automatic extraction algorithm of step lines from point cloud in open-pit mine based on gradient of scalar field[J]. Bulletin of Surveying and Mapping, 2023(7):63-68.
doi: 10.13474/j.cnki.11-2246.2023.0202 |
|
| [12] | ISMAIL Taha Comlekciler, SALIH Gunes, CELAL Irgin. Artificial 3D contactless measurement in orthognathic surgery with binocular stereo vision[J]. Applied Soft Computing, 2016, 4(41): 505-514. |
| [13] | 郑文, 林文, 韩晓东, 等. 工程项目全过程可视化数字监管技术研究[J]. 闽江学院学报, 2023, 44(2):41-52. |
| ZHENG Wen, LIN Wen, HAN Xiaodong, et al. Research of the visual digital supervision of the whole process of the engineering project[J]. Journal of Minjiang University, 2023, 44(2):41-52. | |
| [14] | 宋丽梅, 张继鹏, 李云鹏, 等. 基于多视角红外传感器的三维重建方法[J]. 液晶与显示, 2023, 38(6):759-769. |
| SONG Limei, ZHANG Jipeng, LI Yunpeng, et al. 3D reconstruction method based on multi-view infrared sensor[J]. Chinese Journal of Liquid Crystals and Displays, 2023, 38(6):759-769. | |
| [15] | 李春雷, 王亚男, 葛仁磊, 等. 非线性模型的抗差最小二乘法及其在圆心拟合中的应用[J]. 山东化工, 2023, 52(13):178-181. |
| LI Chunlei, WANG Yanan, GE Renlei, et al. Robust least squares method of nonlinear model and its application in circle center fitting[J]. Shandong Chemical Industry, 2023, 52(13):178-181. | |
| [16] | 罗保林, 张献州, 罗超. 融合罗德里格矩阵和整体最小二乘的双目机器人手眼标定算法[J]. 测绘科学技术学报, 2019, 36(3):244-249. |
| LUO Baolin, ZHANG Xianzhou, LUO Chao. Hand-eye calibration algorithm for binocular robot based on lodrigues matrix and total least squares[J]. Journal of Geomatics Science and Technology, 2019, 36(3):244-249. |
| [1] | 许纶有, 邹鲲, 吴浩男. 基于机器视觉的浆纱机经轴区断纱故障检测[J]. 纺织学报, 2025, 46(06): 231-239. |
| [2] | 李吉国, 景军锋, 程为, 王永波, 刘薇. 基于机器视觉的玻璃纤维纱团外观缺陷检测系统设计[J]. 纺织学报, 2025, 46(05): 243-251. |
| [3] | 任柯, 周衡书, 魏瑾瑜, 闫文君, 左言文. 基于机器视觉技术的百褶裙动态美感评价[J]. 纺织学报, 2024, 45(12): 189-198. |
| [4] | 任佳伟, 周其洪, 陈唱, 洪巍, 岑均豪. 基于机器视觉的交叉缠绕式筒子纱位姿检测方法[J]. 纺织学报, 2024, 45(11): 207-214. |
| [5] | 陈育帆, 郑小虎, 徐修亮, 刘冰. 基于机器视觉的缝纫线迹缺陷检测方法[J]. 纺织学报, 2024, 45(07): 173-180. |
| [6] | 王建萍, 沈津竹, 姚晓凤, 朱妍西, 张帆. 服装裁片自动抓取技术及其布局方法的研究进展[J]. 纺织学报, 2024, 45(06): 227-234. |
| [7] | 杨金鹏, 景军锋, 李吉国, 王渊博. 基于机器视觉的玻璃纤维合股纱缺陷检测系统设计[J]. 纺织学报, 2024, 45(05): 193-201. |
| [8] | 文嘉琪, 李新荣, 冯文倩, 李瀚森. 印花面料的边缘轮廓快速提取方法[J]. 纺织学报, 2024, 45(05): 165-173. |
| [9] | 白恩龙, 张周强, 郭忠超, 昝杰. 基于机器视觉的棉花颜色检测方法[J]. 纺织学报, 2024, 45(03): 36-43. |
| [10] | 葛苏敏, 林瑞冰, 徐平华, 吴思熠, 罗芊芊. 基于机器视觉的曲面枕个性化定制方法[J]. 纺织学报, 2024, 45(02): 214-220. |
| [11] | 许高平, 孙以泽. 移动机械臂牵引卷装纱线的动态建模与控制[J]. 纺织学报, 2024, 45(01): 1-11. |
| [12] | 史伟民, 韩思捷, 屠佳佳, 陆伟健, 段玉堂. 基于机器视觉的空纱筒口定位方法[J]. 纺织学报, 2023, 44(11): 105-112. |
| [13] | 金守峰, 沈文军, 肖福礼, 李毅. 基于线结构光的钢领内表面圆度测量方法[J]. 纺织学报, 2023, 44(10): 164-171. |
| [14] | 李新荣, 韩鹏辉, 李瑞芬, 贾坤, 路元江, 康雪峰. 数字孪生在纺纱领域应用的关键技术解析[J]. 纺织学报, 2023, 44(10): 214-222. |
| [15] | 陈泰芳, 周亚勤, 汪俊亮, 徐楚桥, 李冬武. 基于视觉特征强化的环锭纺细纱断头在线检测方法[J]. 纺织学报, 2023, 44(08): 63-72. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号