纺织学报 ›› 2023, Vol. 44 ›› Issue (10): 188-195.doi: 10.13475/j.fzxb.20220307801
李麒阳, 季诚昌, 郗欣甫( ), 孙以泽
), 孙以泽
LI Qiyang, JI Chengchang, CHI Xinfu(), SUN Yize
摘要:
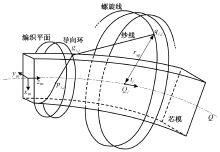
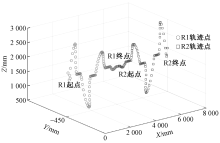
针对大尺寸异形结构芯模在编织过程中牵引轨迹精度低、编织角误差大等问题,提出一种基于双机器人协同夹持芯模进行编织的轨迹求解方法,并预测纱线轨迹。首先求解第1台机器人轨迹保证任意一段离散芯模垂直通过编织平面,再利用几何约束求解第2台机器人轨迹,然后提出针对该机器人轨迹的纱线预测模型,预测任意时刻纱线落在芯模上的位置。实验结果表明:使用本文求解的机器人轨迹进行编织可使芯模等截面部分编织角与期望值的误差在±3°以内,弯曲变截面部分的误差在±7°以内;预测模型的结果与实际测量编织角的等截面部分误差在±3°以内,弯曲变截面部分的误差在±5°以内。
中图分类号:
| [1] |
ZHOU H, HU D, GU B, et al. Transverse impact performance and finite element analysis of three dimensional braided composite tubes with different braiding layers[J]. Composite Structures, 2017, 168: 345-359.
doi: 10.1016/j.compstruct.2017.02.025 |
| [2] | GONDRAN M, ABDIN Y, GENDREAU Y, et al. Automated braiding of non-axisymmetric structures using an iterative inverse solution with angle control[J]. Composites Part A: Applied Science and Manufacturing, 2021.DOI: 10.1016/j.compositesa.2021.106288. |
| [3] | CHI X, LI Q, YAN H, et al. Robot trajectory optimization control of braiding for three-dimensional complex preforms[J]. Journal of Engineered Fibers and Fabrics, 2021.DOI: 10.1177/15589250211043. |
| [4] |
MARTINEC T, MLÝNEK J, PETRŮ M. Calculation of the robot trajectory for the optimum directional orientation of fibre placement in the manufacture of composite profile frames[J]. Robotics and Computer-Integrated Manufacturing, 2015, 35: 42-54.
doi: 10.1016/j.rcim.2015.02.004 |
| [5] |
MENG Z, YAO L, SUN Y, et al. Prediction method for offset compensation on three-dimensional mandrel with spatial irregular shape[J]. Journal of Industrial Textiles, 2021, 50(8): 1205-1224.
doi: 10.1177/1528083719858766 |
| [6] |
DU G W, POPPER P. Analysis of a circular braiding process for complex shapes[J]. Journal of The Textile Institute, 2008, 85(3): 316-337.
doi: 10.1080/00405009408631277 |
| [7] |
SWERY E E, HANS T, BULTEZ M, et al. Complete simulation process chain for the manufacturing of braided composite parts[J]. Composites Part A: Applied Science and Manufacturing, 2017, 102: 378-390.
doi: 10.1016/j.compositesa.2017.08.011 |
| [8] |
MONNOT P, LÉVESQUE J, LABERGE LEBEL L. Automated braiding of a complex aircraft fuselage frame using a non-circular braiding model[J]. Composites Part A: Applied Science and Manufacturing, 2017, 102: 48-63.
doi: 10.1016/j.compositesa.2017.07.011 |
| [9] |
MICHAELI W, ROSENBAUM U, JEHRKE M. Processing strategy for braiding of complex-shaped parts based on a mathematical process description[J]. Composites Manufacturing, 1990, 1(4): 243-251.
doi: 10.1016/0956-7143(90)90047-Z |
| [10] | 王晓明, 邹婷, 李超婧, 等. 基于编织点起始位置及牵拉速度变化的编织角预测模型[J]. 纺织学报, 2015, 36(9): 28-33. |
| WANG Xiaoming, ZOU Ting, LI Chaojing, et al. Predicting model for braiding angle based on initial braiding height and take-up speed[J] Journal of Textile Research, 2015, 36 (9): 28-33. | |
| [11] |
NISHIMOTO H, OHTANI A, NAKAI A, et al. Prediction method for temporal change in fiber orientation on cylindrical braided preforms[J]. Textile Research Journal, 2010, 80(9): 814-821.
doi: 10.1177/0040517509352523 |
| [1] | 左祺, 吴华伟, 王春红, 杜娟娟. 纱线结构对苎麻短纤纱复合材料拉伸性能的影响[J]. 纺织学报, 2023, 44(10): 81-89. |
| [2] | 钱晨, 黄博翔, 李永强, 万军民, 傅雅琴. 增强纤维用上浆剂的耐高温化改性研究进展[J]. 纺织学报, 2023, 44(09): 232-242. |
| [3] | 孙明涛, 陈成玉, 闫伟霞, 曹珊珊, 韩克清. 针刺加固频率对黄麻纤维/聚乳酸短纤复合板性能的影响[J]. 纺织学报, 2023, 44(09): 91-98. |
| [4] | 汪泽幸, 周衡书, 杨敏, 谭冬宜. 不同循环加载路径下黄麻织物/聚乙烯复合材料的变形特性[J]. 纺织学报, 2023, 44(09): 99-107. |
| [5] | 安雪, 刘太奇, 李言, 赵小龙. 牢固结合的多层纳米纤维复合材料的制备及其过滤性能[J]. 纺织学报, 2023, 44(08): 50-56. |
| [6] | 陈露, 吴孟锦, 贾立霞, 阎若思. 氧等离子体改性超高分子量聚乙烯纤维复合材料层间损伤声发射特征分析[J]. 纺织学报, 2023, 44(07): 116-125. |
| [7] | 段成红, 吴港本, 罗翔鹏. 基于DIGIMAT的碳纤维增强环氧树脂编织复合材料的力学性能[J]. 纺织学报, 2023, 44(07): 126-131. |
| [8] | 杨金, 李麒阳, 季霞, 孙以泽. 复合材料编织-缠绕-拉挤系统建模及其控制策略[J]. 纺织学报, 2023, 44(07): 199-206. |
| [9] | 李皎, 陈利, 姚天磊, 陈小明. 类回转预制体针刺机器人系统设计[J]. 纺织学报, 2023, 44(07): 207-213. |
| [10] | 吕钧炜, 罗龙波, 刘向阳. 基于直接氟化技术的芳纶表/界面结构设计与制备研究进展[J]. 纺织学报, 2023, 44(06): 21-27. |
| [11] | 韦玉辉, 郑晨, 程尔骕, 赵书涵, 苏兆伟. 光催化自清洁芳纶织物的制备及其性能[J]. 纺织学报, 2023, 44(05): 171-176. |
| [12] | 周泠卉, 曾佩, 鲁瑶, 付少举. 聚乙烯醇纳米纤维膜/罗纹空气层织物复合吸声材料的制备及其性能[J]. 纺织学报, 2023, 44(03): 73-78. |
| [13] | 刘东炎, 郑成燕, 王晓旭, 钱坤, 张典堂. 超高分子量聚乙烯织物/聚脲柔性复合材料的抗破片侵彻机制[J]. 纺织学报, 2023, 44(03): 79-87. |
| [14] | 冯帅博, 强荣, 邵玉龙, 杨啸, 马茜, 陈博文, 陈熠, 高明洋, 陈彩虹. 丝瓜络衍生碳纤维基复合材料的电磁波吸收性能[J]. 纺织学报, 2023, 44(02): 69-75. |
| [15] | 蔡洁, 王亮, 傅宏俊, 钟智丽. 玻璃纤维/碳纤维织物基复合材料的电磁屏蔽性能[J]. 纺织学报, 2023, 44(02): 111-117. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号