纺织学报 ›› 2025, Vol. 46 ›› Issue (05): 49-58.doi: 10.13475/j.fzxb.20241205002
吴梦婕1, 夏勇1, 张雨凡2, 周欣然2, 俞建勇1,2, 熊佳庆1,2( )
)
WU Mengjie1, XIA Yong1, ZHANG Yufan2, ZHOU Xinran2, YU Jianyong1,2, XIONG Jiaqing1,2()
摘要:
变形-感知一体化智能材料具备自适应形变和交互安全性,可实时监测并反馈环境或自身状态信息,在智能装备、工业生产/生活、环境和医用等领域有重要应用。近年来,纤维基智能变形材料研究热度空前,并逐步形成了一体化变形-感知智能材料这个重要方向。为系统展示该领域成果并促进领域进一步发展,首先综述了纤维/织物基驱动器的研究进展,具体阐述了各类刺激响应的驱动变形原理;接着着重介绍了一体化驱动-感知型智能纤维/织物材料的应用,阐述了该类材料发展面临的挑战和可能的解决方案。最后指出:未来应着重深化机制研究、提升材料性能和环境适应性、推动智能变形纤维材料的集成化/智能化/规模化发展。
中图分类号:
| [1] | WILSON A M, LOWE J C, ROSKILLY K, et al. Locomotion dynamics of hunting in wild cheetahs[J]. Nature, 2013, 498(7453): 185-189. |
| [2] |
CROXALL John P, SILK Janet R D, PHILLIPS Richard A, et al. Global circumnavigations: tracking year-round ranges of nonbreeding albatrosses[J]. Science, 2005, 307(5707): 249-250.
pmid: 15653503 |
| [3] | SILVA Pedro E S, LIN Xueyan, VAARA Maija, et al. Active textile fabrics from weaving liquid crystalline elastomer filaments[J]. Advanced Materials, 2023. DOI: 10.1002/adma.202210689. |
| [4] | ZHANG Chun, FEI Guoxia, LU Xili, et al. Liquid crystal elastomer artificial tendrils with asymmetric core-sheath structure showing evolutionary biomimetic locomotion[J]. Advanced Materials, 2024. DOI: 10.1002/adma.202307210. |
| [5] | CHEN Wenhui, TONG Dezhong, MENG Linghan, et al. Knotted artificial muscles for bio-mimetic actuation under deepwater[J]. Advanced Materials, 2024. DOI: 10.1002/adma.202400763. |
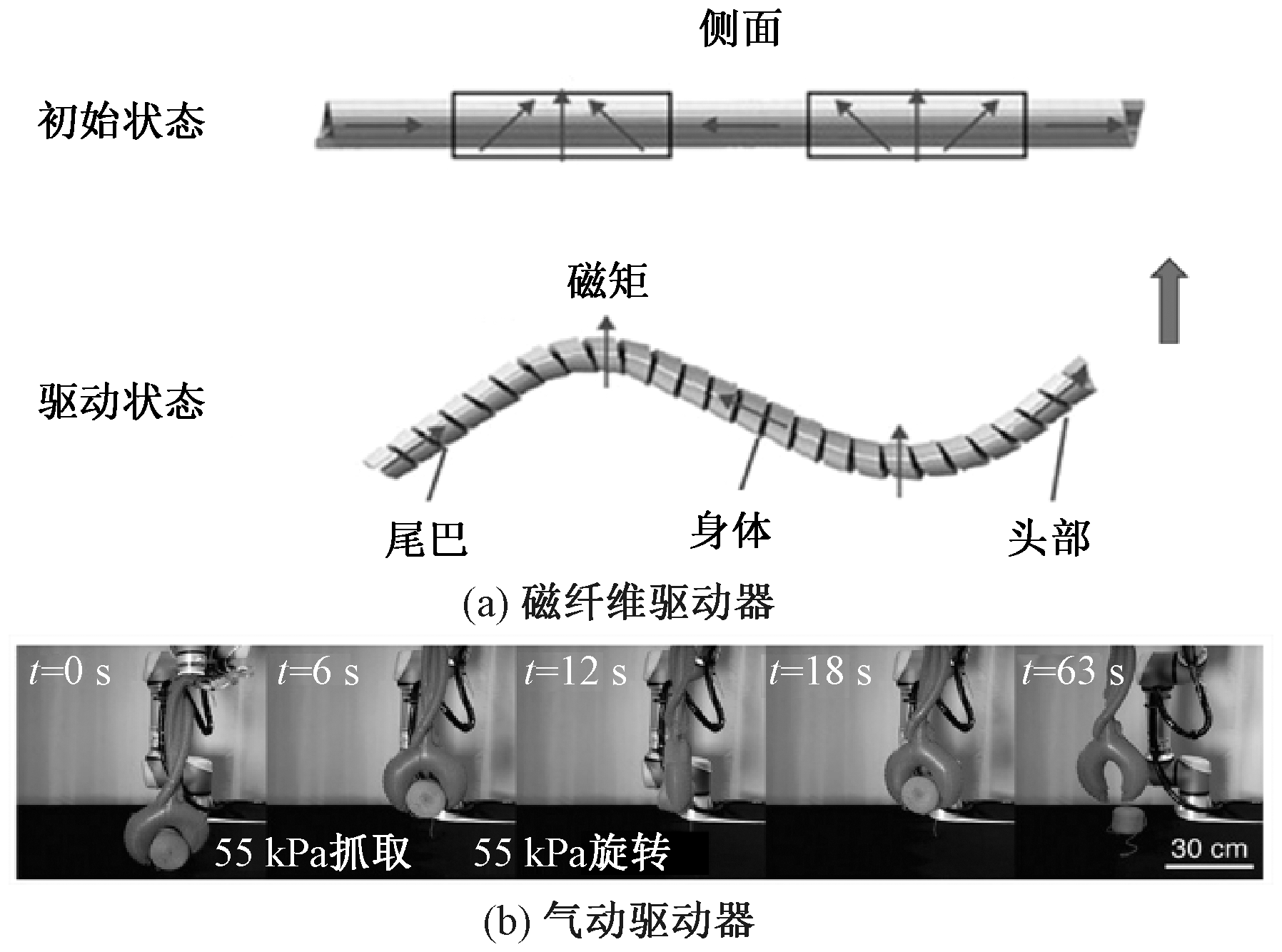
| [6] | ZHANG Zhuang, LONG Yongzhou, CHEN Genliang, et al. Soft and lightweight fabric enables powerful and high-range pneumatic actuation[J]. Science Advances, 2023. DOI: 10.1126/sciadv.adg1203. |
| [7] | AI Wenfei, HOU Kai, WU Jiaxin, et al. Miniaturized and untethered McKibben muscles based on photothermal-induced gas-liquid transformation[J]. Nature Communications, 2024. DOI: 10.1038/s41467-024-45540-4. |
| [8] | PENG Yangyang, SUN Fengxin, XIAO Caiqin, et al. Hierarchically structured and scalable artificial muscles for smart textiles[J]. ACS Applied Materials & Interfaces, 2021, 13(45): 54386-54395. |
| [9] | 王建萍, 朱妍西, 沈津竹, 等. 软体机器人在服装领域的应用进展[J]. 纺织学报, 2024, 45(5): 239-247. |
| WANG Jianping, ZHU Yanxi, SHEN Jinzhu, et al. Advances in application of soft robot in the apparel field[J]. Journal of Textile Research, 2024, 45(5): 239-247. | |
| [10] | DARMAWAN B A, GONG D, PARK H, et al. Magnetically controlled reversible shape-morphing microrobots with real-time X-ray imaging for stomach cancer applications[J]. Journal of Materials Chemistry B, 2022, 10(23): 4509-4518. |
| [11] | QIU Shuang, PEI Zhongcai, WANG Chen, et al. Systematic review on wearable lower extremity robotic exoskeletons for assisted locomotion[J]. Journal of Bionic Engineering, 2023, 20(2): 436-469. |
| [12] | XIONG Wennan, ZHU Chen, GUO Dongliang, et al. Bio-inspired, intelligent flexible sensing skin for multifunctional flying perception[J]. Nano Energy, 2021. DOI: 10.1016/j.nanoen.2021.106550. |
| [13] | HAN Minwoo, RODRIGUE Hugo, CHO Seunghyun, et al. Woven type smart soft composite for soft morphing car spoiler[J]. Composites Part B: Engineering, 2016, 86: 285-298. |
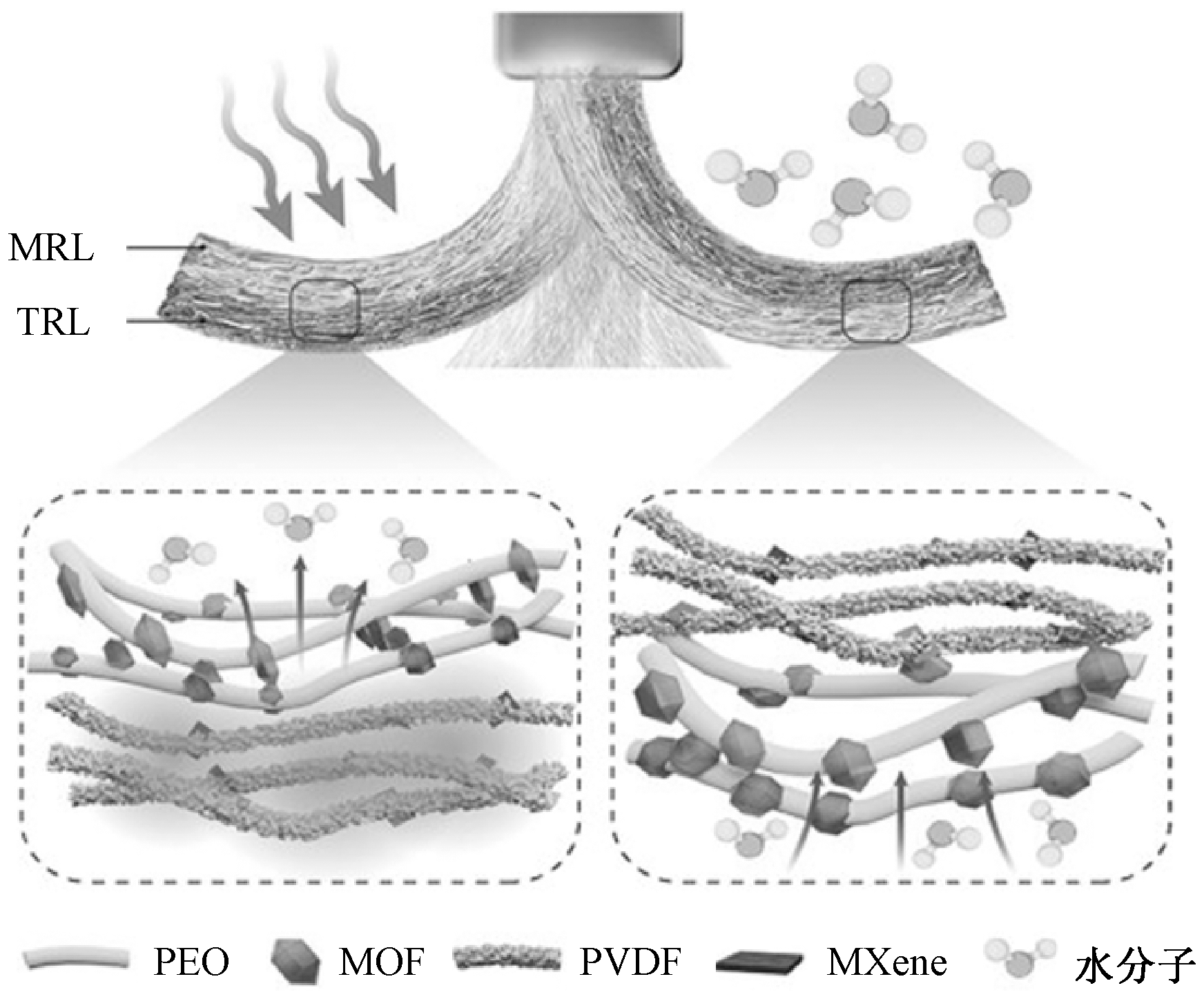
| [14] | ZHANG Yufan, ZHOU Xinran, LIU Luyun, et al. Highly-aligned all-fiber actuator with asymmetric photothermal-humidity response and autonomous perceptivity[J]. Advanced Materials, 2024. DOI: 10.1002/adma.202404696. |
| [15] | ZHENG Maorong, LIU Mingyuan, CHENG Yin, et al. Stimuli-responsive fiber/fabric actuators for intelligent soft robots: from current progress to future opportuni-ties[J]. Nano Energy, 2024. DOI: 10.1016/j.nanoen.2024.110050. |
| [16] | XUE Enbo, LIU Limei, WU Wei, et al. Soft fiber/textile actuators: from design strategies to diverse applications[J]. ACS Nano, 2023, 18(1): 89-118. |
| [17] | SUN Linchao, CHE Lixuan, LI Ming, et al. Zero-waste emission design of sustainable and programmable actuators[J]. Sustainable Materials, 2023, 3(2): 207-221. |
| [18] | XIONG Jiaqing, CHEN Jian, LEE Pooi See. Functional fibers and fabrics for soft robotics, wearables, and human-robot interface[J]. Advanced Materials, 2021. DOI: 10.1002/adma.202002640. |
| [19] | PAN C L, MA Y T, LIU Y B, et al. Torsional displacement of piezoelectric fiber actuators with helical electrodes[J]. Sensors and Actuators A: Physical, 2008, 148(1): 250-258. |
| [20] | KHUDIYEV T, CLAYTON J, LEVY E, et al. Electrostrictive microelectromechanical fibres and textiles[J]. Nature Communications, 2017. DOI: 10.1038/s41467-017-01558-5. |
| [21] | HAERTLING G H. Ferroelectric ceramics: history and technology[J]. Journal of the American Ceramic Society, 1999, 82(4): 797-818. |
| [22] |
LOVINGER A J. Ferroelectric polymers[J]. Science, 1983, 220(4602): 1115-1121.
pmid: 17818472 |
| [23] | LANG Tianhong, YANG Lixue, YANG Shiju, et al. Emerging innovations in electrically powered artificial muscle fibers[J]. National Science Review, 2024. DOI: 10.1093/nsr/nwae232. |
| [24] | MIRVAKILI Seyed M, HUNTER Ian W. Artificial muscles: mechanisms, applications, and challen-ges[J]. Advanced Materials, 2018. DOI: 10.1002/adma.201704407. |
| [25] | HE Jin, CHEN Zheqi, XIAO Youhua, et al. Intrinsically anisotropic dielectric elastomer fiber actuators[J]. ACS Materials Letters, 2022, 4(3): 472-479. |
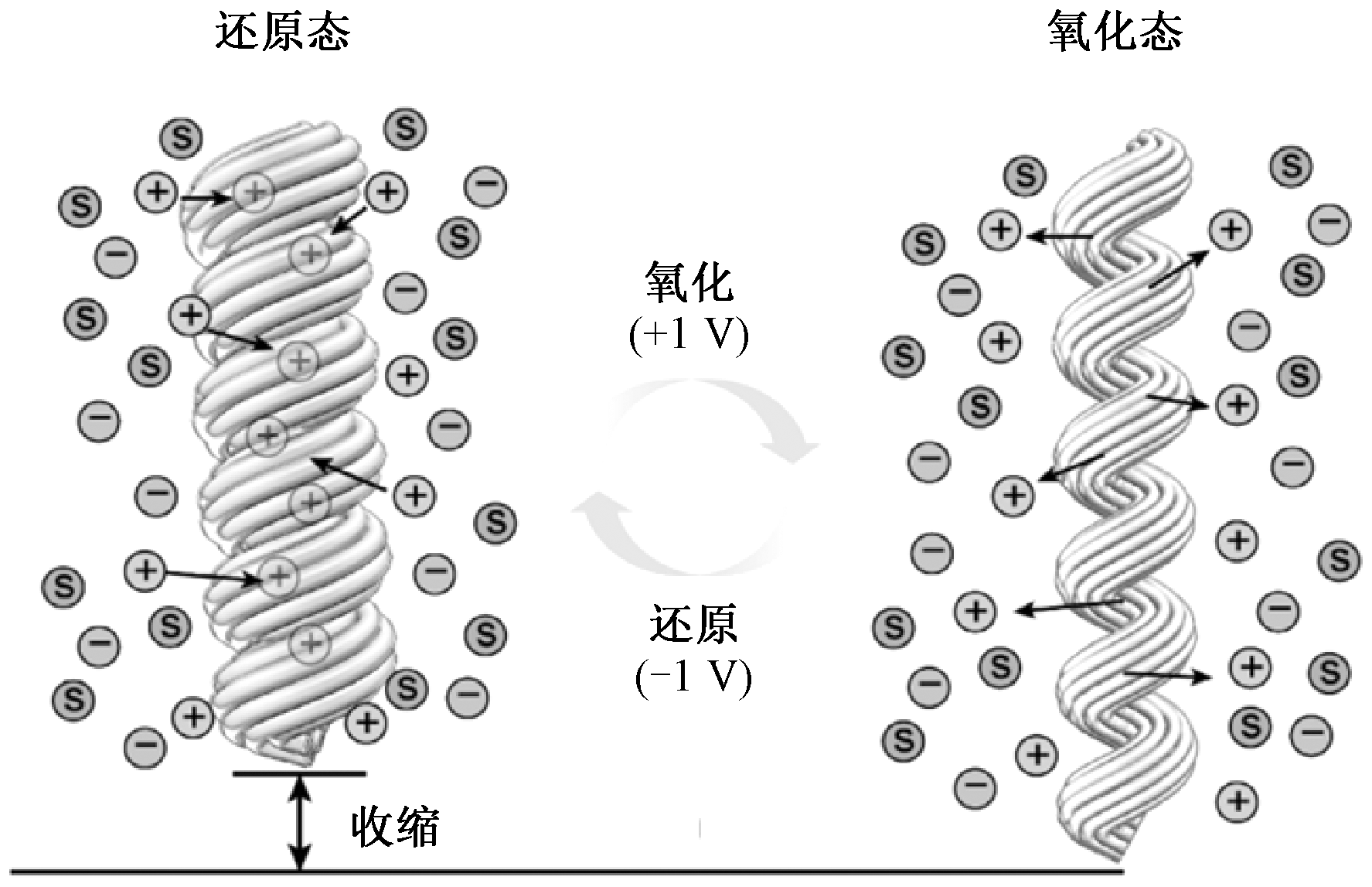
| [26] | WANG Yulian, QIAO Jian, WU Kunjie, et al. High-twist-pervaded electrochemical yarn muscles with ultralarge and fast contractile actuations[J]. Materials Horizons, 2020, 7(11): 3043-3050. |
| [27] | HU Hongwei, ZHANG Shengtao, ZHANG Mengyang, et al. Artificial muscles based on coiled conductive polymer yarns[J]. Advanced Functional Materials, 2024. DOI: 10.1002/adfm.202401685. |
| [28] |
MU Jiuke, JUNG DE ANDRADE Mônica, FANG Shaoli, et al. Sheath-run artificial muscles[J]. Science, 2019, 365(6449): 150-155.
doi: 10.1126/science.aaw2403 pmid: 31296765 |
| [29] | QIAO Jian, DI Jiangtao, ZHOU Susheng, et al. Large-stroke electrochemical carbon nanotube/graphene hybrid yarn muscles[J]. Small, 2018. DOI: 10.1002/smll.201801883. |
| [30] | QIAO Jian, WU Yulong, ZHU Chengfeng, et al. High-performance carbon nanotube/polyaniline artificial yarn muscles working in biocompatible environments[J]. Nano Research, 2023, 16(3): 4143-4151. |
| [31] |
CHEN Peining, HE Sisi, XU Yifan, et al. Electromechanical actuator ribbons driven by electrically conducting spring-like fibers[J]. Advanced Materials, 2015, 27(34): 4982-4988.
doi: 10.1002/adma.201501731 |
| [32] | CHEN Yuanhao, VALENZUELA Cristian, LIU Yuan, et al. Biomimetic artificial neuromuscular fiber bundles with built-in adaptive feedback[J]. Matter, 2024. DOI: 10.1016/j.matt.2024.10.022. |
| [33] | CUI Bo, REN Ming, DONG Lizhong, et al. Pretension-free and self-recoverable coiled artificial muscle fibers with powerful cyclic work capability[J]. ACS Nano, 2023, 17(13): 12809-12819. |
| [34] | 刘仁义, 杨琴, 孙宝忠, 等. 织物增强复合材料的电热驱动形状记忆回复行为[J]. 纺织学报, 2025, 46(1):72-79. |
| LIU Renyi, YANG Qin, SUN Baozhong, et al. Electrically and thermally driven shape memory recovery behavior of fabric-reinforced composites[J]. Journal of Textile Research, 2025, 46(1): 72-79. | |
| [35] | 付驰宇, 徐傲, 齐硕, 等. 形状记忆合金复合纱线及其面料驱动性能[J]. 纺织学报, 2023, 44(6): 91-97. |
| FU Chiyu, XU Ao, QI Shuo, et al. Shape memory alloy composite yarn and its fabric driving performance[J]. Journal of Textile Research, 2023, 44 (6): 91-97. | |
| [36] | HU Xinghao, JIA Jingjing, WANG Yingming, et al. Fast large-stroke sheath-driven electrothermal artificial muscles with high power densities[J]. Advanced Functional Materials, 2022. DOI: 10.1002/adfm.202200591. |
| [37] | WANG Xiaobo, WANG Yulian, REN Ming, et al. Knittable electrochemical yarn muscle for morphing textiles[J]. ACS Nano, 2024, 18(13): 9500-9510. |
| [38] | YANG Zhangqin, WANG Yuting, LAN Lidan, et al. Bioinspired H-bonding connected gradient nanostructure actuators based on cellulose nanofibrils and graph-ene[J]. Small, 2024. DOI: 10.1002/smll.202401580. |
| [39] | LIN Shihui, WANG Zhen, CHEN Xinyan, et al. Ultrastrong and highly sensitive fiber microactuators constructed by force-reeled silks[J]. Advanced Science, 2020. DOI: 10.1002/advs.201902743. |
| [40] | LIU Dabiao, TARAKANOVA Anna, HSU Claire C, et al. Spider dragline silk as torsional actuator driven by humidity[J]. Science Advances, 2019. DOI: 10.1126/sciadv.aau9183eaau9183. |
| [41] | LEE Youngbin, KOEHLER Florian, DILLON Tom, et al. Magnetically actuated fiber-based soft robots[J]. Advanced Materials, 2023. DOI: 10.1002/adma.202301916. |
| [42] |
MAO Jiangwei, CHEN Zhaodi, HAN Dongdong, et al. Nacre-inspired moisture-responsive graphene actuators with robustness and self-healing properties[J]. Nanoscale, 2019, 11(43): 20614-20619.
doi: 10.1039/c9nr06579b pmid: 31641724 |
| [43] | LIU Fangfei, LIU Xiong, CHEN Feng, et al. Mussel-inspired chemistry: a promising strategy for natural polysaccharides in biomedical applications[J]. Progress in Polymer Science, 2021. DOI: 10.1016/j.progpolymsci.2021.101472. |
| [44] | WANG Wen, XIANG Chenxue, LIU Qiongzhen, et al. Natural alginate fiber-based actuator driven by water or moisture for energy harvesting and smart controller applications[J]. Journal of Materials Chemistry A, 2018, 6(45): 22599-22608. |
| [45] | TANG Gangqiang, ZHAO Xin, LIU Shilong, et al. Moisture-driven actuators[J]. Advanced Functional Materials, 2024. DOI: 10.1002/adfm.202412254. |
| [46] | LEE Bruce P, KONST S. Novel hydrogel actuator inspired by reversible mussel adhesive protein chemis-try[J]. Advanced Materials, 2014, 26(21): 3415-3419. |
| [47] | SONG Jianchun, CHEN Shuo, SUN Lijie, et al. Mechanically and electronically robust transparent organohydrogel fibers[J]. Advanced Materials, 2020. DOI: 10.1002/adma.201906994. |
| [48] | DOU Yuanyuan, WANG Zhen-Pei, HE Wenqian, et al. Artificial spider silk from ion-doped and twisted core-sheath hydrogel fibres[J]. Nature Communications, 2019. DOI: 10.1038/s41467-019-13257-4. |
| [49] | YU Yadong, HE Yan, MU Zhao, et al. Biomimetic mineralized organic-inorganic hybrid macrofiber with spider silk-like supertoughness[J]. Advanced Functional Materials, 2020. DOI: 10.1002/adfm.201908556. |
| [50] |
CHU Crystal K, JOSEPH Alby J, LIMJOCO Matthew D, et al. Chemical tuning of fibers drawn from extensible hyaluronic acid networks[J]. Journal of the American Chemical Society, 2020, 142(46): 19715-19721.
doi: 10.1021/jacs.0c09691 pmid: 33141568 |
| [51] | SUN Jinkun, GUO Wenjin, MEI Guangkai, et al. Artificial spider silk with buckled sheath by nano-pulley combing[J]. Advanced Materials, 2023. DOI: 10.1002/adma.202212112. |
| [52] | HE Wenqian, WANG Meilin, MEI Guangkai, et al. Establishing superfine nanofibrils for robust polyelectrolyte artificial spider silk and powerful artificial muscles[J]. Nature Communications, 2024. DOI: 10.1038/s41467-024-47796-2. |
| [53] | SHENG Nan, PENG Yangyang, SUN Fengxin, et al. High-performance fasciated yarn artificial muscles prepared by hierarchical structuring and sheath-core coupling for versatile textile actuators[J]. Advanced Fiber Materials, 2023, 5(4): 1534-1547. |
| [54] | AZIZ Shazed, ZHANG Xi, NAFICY Sina, et al. Plant-like tropisms in artificial muscles[J]. Advanced Materials 2023. DOI: 10.1002/adma.202212046. |
| [55] |
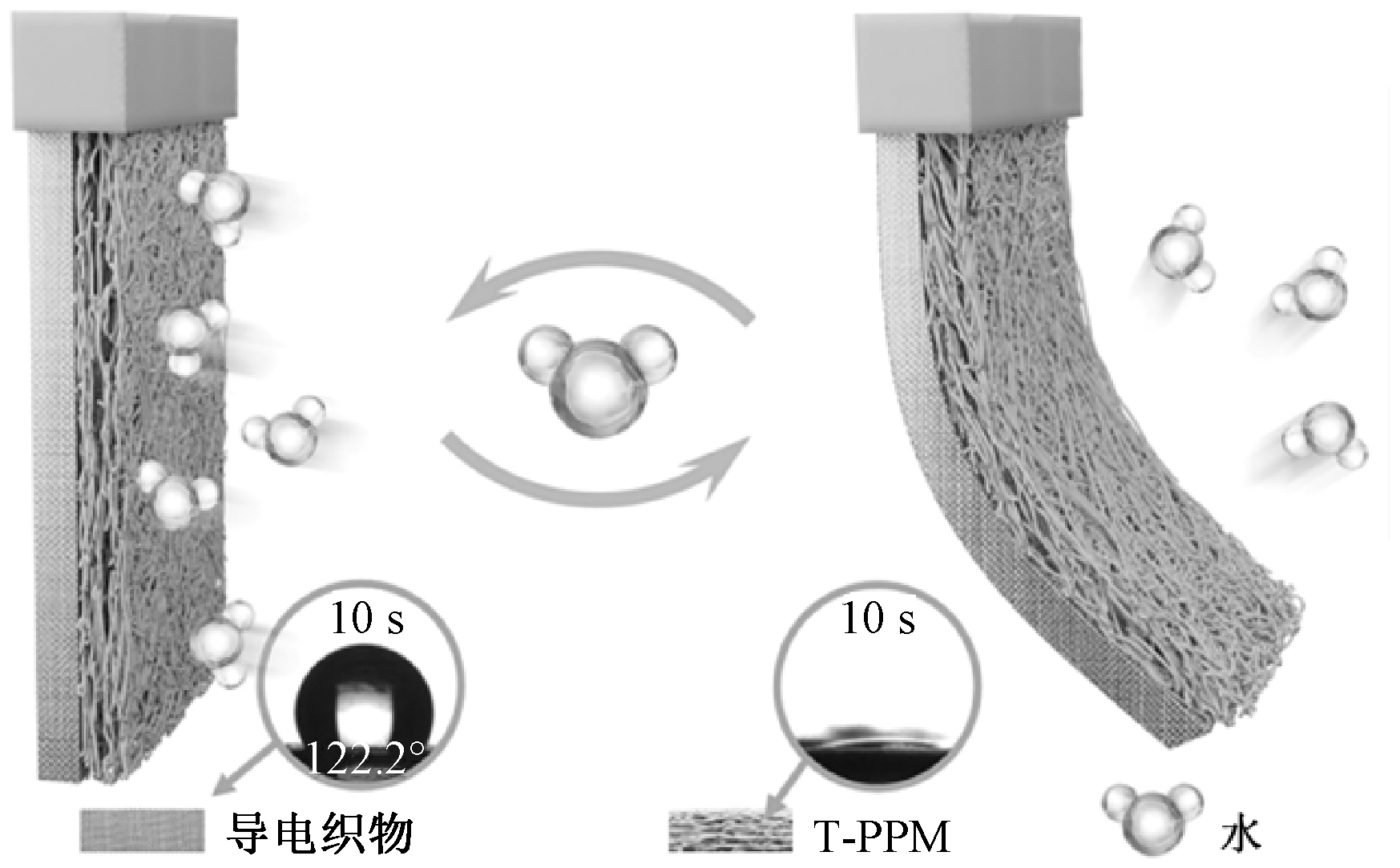
ZHOU Jiahui, ZHANG Yufan, ZHANG Jiwei, et al. Breathable metal-organic framework enhanced humidity-responsive nanofiber actuator with autonomous triboelectric perceptivity[J]. ACS Nano, 2023, 17(18): 17920-17930.
doi: 10.1021/acsnano.3c04022 pmid: 37668183 |
| [56] |
LANCIA F, RYABCHUN A, KATSONIS N. Life-like motion driven by artificial molecular machines[J]. Nature Reviews Chemistry, 2019, 3(9): 536-551.
doi: 10.1038/s41570-019-0122-2 |
| [57] | WU Mengjie, ZHOU Xinran, ZHANG Jiwei, et al. Microfiber actuators with hot-pressing programmable mechano photothermal responses for electromagnetic perception[J]. Advanced Materials, 2024. DOI: 10.1002/adma.202409606. |
| [58] | HE Qiguang, WANG Zhijian, WANG Yang, et al. Electrospun liquid crystal elastomer microfiber actuator[J]. Science Robotics, 2021. DOI: 10.1126/scirobotics.abi9704. |
| [59] |
CHENG Yin, WANG Ranran, CHAN Kwokhoe, et al. A biomimetic conductive tendril for ultrastretchable and integratable electronics, muscles, and sensors[J]. ACS Nano, 2018, 12(4): 3898-3907.
doi: 10.1021/acsnano.8b01372 pmid: 29584398 |
| [60] | ZHAO Hongtao, QI Xiangjun, MA Yulong, et al. Wearable sunlight-triggered bimorph textile actua-tors[J]. Nano Letters, 2021, 21(19): 8126-8134. |
| [61] | CHEN Mengxiao, WANG Zhe, ZHANG Qichong, et al. Self-powered multifunctional sensing based on super-elastic fibers by soluble-core thermal drawing[J]. Nature Communications, 2021. DOI: 10.1038/s41467-021-21729-9. |
| [62] | QU Yunpeng, NGUYEN-DANG Tung, PAGE Alexis GÉrald, et al. Superelastic multimaterial electronic and photonic fibers and devices via thermal drawing[J]. Advanced Materials, 2018. DOI: 10.1002/adma.201707251. |
| [63] |
KANIK Mehmet, ORGUC Sirma, VARNAVIDES Georgios, et al. Strain-programmable fiber-based artificial muscle[J]. Science, 2019, 365(6449): 145-150.
doi: 10.1126/science.aaw2502 pmid: 31296764 |
| [64] | LIU Luyun, ZHANG Yufan, WU Mengjie, et al. Asymmetric nanofiber photothermal interactive electronic skin with triboelectric autonomous thermal percep-tivity[J]. Nano Energy, 2024. DOI: 10.1016/j.nanoen.2024.109717. |
| [65] | DONG Yue, WANG Jie, GUO Xukui, et al. Multi-stimuli-responsive programmable biomimetic actu-ator[J]. Nature Communications, 2019. DOI: 10.1038/s41467-019-12044-5. |
| [66] | QI Miao, LIU Yanting, WANG Zhe, et al. Self-healable multifunctional fibers via thermal drawing[J]. Advanced Science, 2024. DOI: 10.1002/advs.202400785. |
| [67] | LI Mingtong, TANG Yichao, SOON Ren Hao, et al. Miniature coiled artificial muscle for wireless soft medical devices[J]. Science Advances, 2022. DOI:10.1126/sciadv.abm5616. |
| [68] | KIM Yoonho, YUK Hyunwoo, ZHAO Ruike, et al. Printing ferromagnetic domains for untethered fast-transforming soft materials[J]. Nature, 2018, 558(7709): 274-279. |
| [69] | JO C, PUGAL D, OH I, et al. Recent advances in ionic polymer-metal composite actuators and their modeling and applications[J]. Progress in Polymer Science, 2013, 38(7): 1037-1066. |
| [70] |
SINGH G, KRISHNAN G. Designing fiber-reinforced soft actuators for planar curvilinear shape matching[J]. Soft Robotics, 2020, 7(1): 109-121.
doi: 10.1089/soro.2018.0169 pmid: 31566502 |
| [71] | CONNOLLY F, POLYGERINOS P, WALSH C J, et al. Mechanical programming of soft actuators by varying fiber angle[J]. Soft Robotics, 2015, 2(1): 26-32. |
| [72] | SANCHEZ V, MAHADEVAN K, OHLSON G, et al. 3D knitting for pneumatic soft robotics[J]. Advanced Functional Materials, 2023. DOI: 10.1002/adfm.202212541. |
| [73] |
DONG Lizhong, REN Ming, WANG Yulian, et al. Self-sensing coaxial muscle fibers with bi-lengthwise actuation[J]. Materials Horizons, 2021, 8(9): 2541-2552.
doi: 10.1039/d1mh00743b pmid: 34870310 |
| [74] | XU Chenxue, JIANG Zhenlin, WANG Baoxiu, et al. Biospinning of hierarchical fibers for a self-sensing actuator[J]. Chemical Engineering Journal, 2024. DOI: 10.1016/j.cej.2024.150014. |
| [75] | DONG Lizhong, REN Ming, WANG Yulian, et al. Artificial neuromuscular fibers by multilayered coaxial integration with dynamic adaption[J]. Science Advances, 2022. DOI: 10.1126/sciadv.abq7703. |
| [76] | LIAO Wei, YANG Zhongqiang. The integration of sensing and actuating based on a simple design fiber actuator towards intelligent soft robots[J]. Advanced Materials Technologies, 2022. DOI: 10.1002/admt.202101260. |
| [77] | TAO Jin, ZHAO Weitao, ZHOU Xinran, et al. Robust all-fabric e-skin with high-temperature and corrosion tolerance for self-powered tactile sensing[J]. Nano Energy, 2024. DOI: 10.1016/j.nanoen.2024.109930. |
| [78] | YANG Haitao, YEOW Bok Seng, LI Zhipeng, et al. Multifunctional metallic backbones for origami robotics with strain sensing and wireless communication capabilities[J]. Science Robotics, 2019. DOI: 10.1126/scirobotics.aax7020. |
| [1] | 李朵, 谢晓雯, 张迪凡, 吴景霞, 陆凯, 陈培宁. Wi-Fi双频织物天线的构建及其电磁性能[J]. 纺织学报, 2025, 46(05): 10-16. |
| [2] | 孙洁, 郭羽晴, 屈芸, 张利平. 芳纶纳米纤维/MXene同轴纤维电极制备及其性能[J]. 纺织学报, 2025, 46(05): 125-134. |
| [3] | 王薇, 高建南, 裴笑涵, 陆鑫, 孙银银, 吴建兵. 纤维素/甲基三甲氧基硅烷气凝胶的制备及其油水分离效能[J]. 纺织学报, 2025, 46(05): 135-142. |
| [4] | 时晓聪, 陈莉, 杜迅. 茜素-聚乳酸/胶原蛋白纳米纤维膜的制备及其氨气检测性能[J]. 纺织学报, 2025, 46(05): 143-150. |
| [5] | 张爱丹, 王倩. 三纬组合全显结构织物的颜色预测方法[J]. 纺织学报, 2025, 46(05): 151-158. |
| [6] | 顾孟尚, 张宁, 潘如如, 高卫东. 结合频域卷积模块的机织物图像疵点目标检测[J]. 纺织学报, 2025, 46(05): 159-168. |
| [7] | 孙晚红, 张鹏飞, 陈勇, 张林, 潘跃山, 宋飞虎, 刘恩星, 王玉萍. 智能发热服装用柔性碳纳米管电加热元件的制备及应用[J]. 纺织学报, 2025, 46(05): 17-22. |
| [8] | 朱梦慧, 葛美彤, 董智佳, 丛洪莲, 马丕波. 纬编双面羊毛/涤纶交织物的结构与热湿性能评价[J]. 纺织学报, 2025, 46(05): 179-185. |
| [9] | 魏志强, 刘新华. 耐热仿生结构色织物的制备及其性能[J]. 纺织学报, 2025, 46(05): 195-201. |
| [10] | 张金芹, 李晶, 肖明, 毕曙光, 冉建华. 聚苯乙烯/还原氧化石墨烯微球传感电热织物的自组装法制备[J]. 纺织学报, 2025, 46(05): 202-213. |
| [11] | 李吉国, 景军锋, 程为, 王永波, 刘薇. 基于机器视觉的玻璃纤维纱团外观缺陷检测系统设计[J]. 纺织学报, 2025, 46(05): 243-251. |
| [12] | 李润, 常梓洋, 张如范. 碳纳米管功能纤维的可控制备与性能调控研究进展[J]. 纺织学报, 2025, 46(05): 30-40. |
| [13] | 陈枭, 赵继忠, 董凯. 基于接触起电效应的新型机电转化纤维性能提升策略[J]. 纺织学报, 2025, 46(05): 41-48. |
| [14] | 韩力杰, 刘樊, 张其冲. 纤维状水系锌离子电池的研究进展与展望[J]. 纺织学报, 2025, 46(05): 59-69. |
| [15] | 张泽祺, 周涛, 周文琪, 范中尧, 杨佳蕾, 陈国印, 潘绍武, 朱美芳. 生理电信号监测用导电纤维及其研究进展[J]. 纺织学报, 2025, 46(05): 70-76. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号